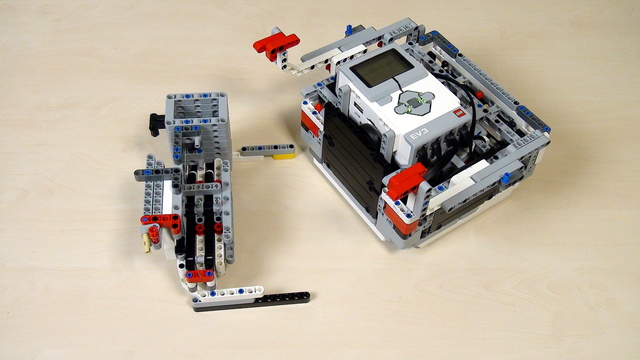
Constructing BigDaddy Competition Robot (Part 1 - Front)
Based on your feedback we have decided to show you the live process of building a complex LEGO Mindstorms Competition robot without having the whole robot ready yet. We would be making mistakes, showing them and taking up the challenges right in front of your eyes. The first construction would not be perfect but we would eventually arive at it.
- #70
- 08 Feb 2015