Kriket - LEGO Education SPIKE Prime box robot
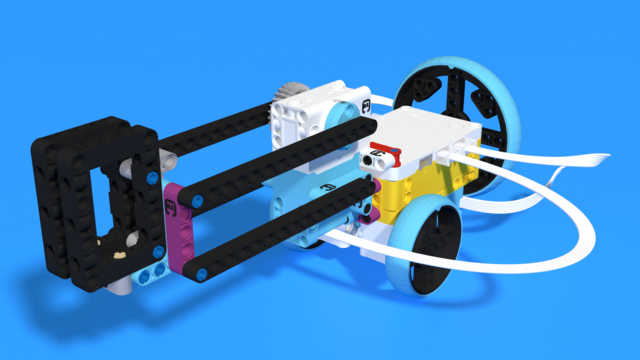
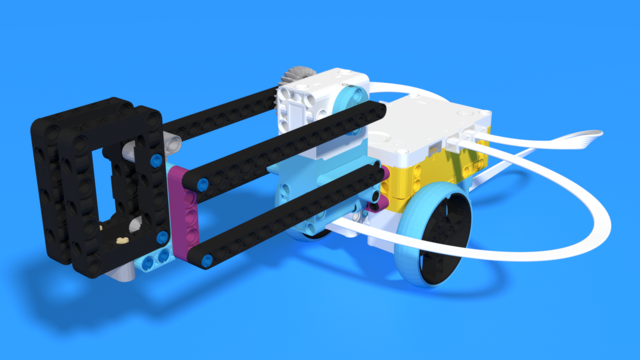
This is Kriket. Kriket is an example of a Box robot assembled from LEGO Education SPIKE Prime and could be used during a competition like FIRST LEGO League to achieve a smooth, repeatable behaviour of the robot. In fact. This is why it was designed. The goal of Kriket is to be a "Box Robot" and to allow for attachments to be glided on top of it. Check the courses for Kriket to understand more about how it could be used.
The robot requires a few more parts than the standard LEGO Education SPIKE Prime + Extension sets, but it is worth purchasing and having them
Here you can find a list of the parts that you'll need to get on top of the SPIKE set 45678 and the expansion set 45680, to build this robot.
- #1665
- 09 Aug 2023