
Task: what happens when a cable is disconnected from the motor or the brick?
Unplug one of the cables and observe what the robot does.
- #370
- 04 Feb 2017
Unplug one of the cables and observe what the robot does.


Now that you have tried and solved a challenge involving a series of instructions, we would like to share a few best practices.

So far we know how to make a turn in an arc, just like the real cars do.
Today we will see what other options our robots have for turning.

Experiment with the software for about five minutes, before we even give you any directions.

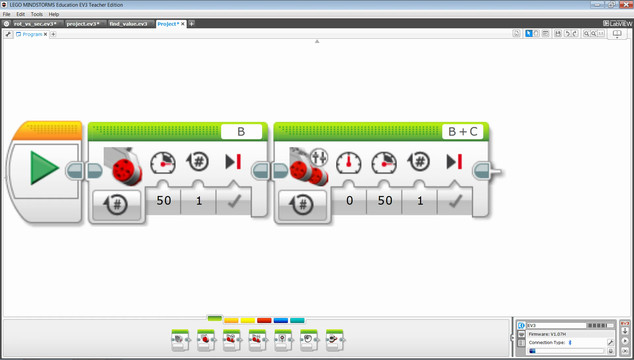
A spin turn is a turn around the center of the robot. Let's learn how to program it.

We challenge you before we give you the theory: browse in the software and try to achieve the behavior in the video below.

We will show you the most reliable way to turn with your robot.

Pivot turns require fractions of rotations, a number between 1 and 2. Sometimes it is more convenient to use degrees.
In the software, you can change the "move block" to use degrees.

Why we will never use seconds in our lessons.

How far will the robot move for one second?

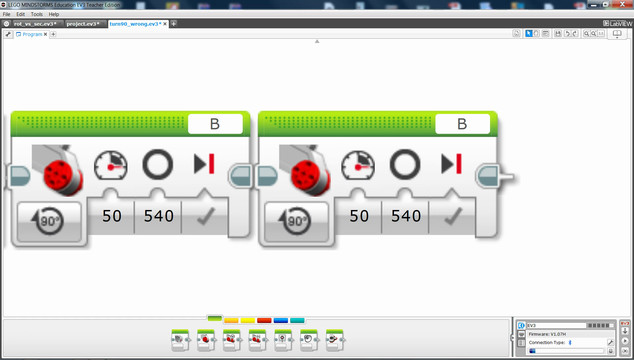
The 90-degree turn of the robot is different from 90-degree turn of the motor!
How to search for an unknown value with the fewest possible tries.
We will introduce a convention, an agreement, how and in which cases we are going to use each types of blocks.

Every turn is a circular motion and we will review the three types of turns from this point of view.

A special fourth case for a turning with robots with two wheels.

Let's put everything that we have learned so far into practice. Let's make a spy robot!

How to approach that fun relief task.

The things that you will be able to do with your EV3 robot by the end of this course are:
Freely move your robot towards desired target;
Avoid obstacles on the path of your robot using sensors;
Follow lines of any shape;
Detecting and picking up objects of any kind;

Our next robot is called CastorBot, because of the castor ball.

Why we change the robots all the time and what to observe in each new robot.

Try to add a touch sensor to the robot on your own.