Video tutorials -
This page shows all the robotics tutorials listed without specific grouping. Each tutorial is short, on specific topic, has a video. Tutorials are structured in sequence in Courses.
Filters:
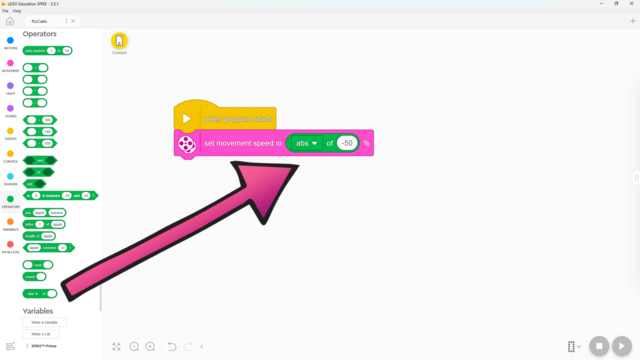

How to use Absolute Value in LEGO SPIKE Prime Word Blocks Software
It is part of the Functions block, but what does it do?
- #2509
- 16 Sep 2025

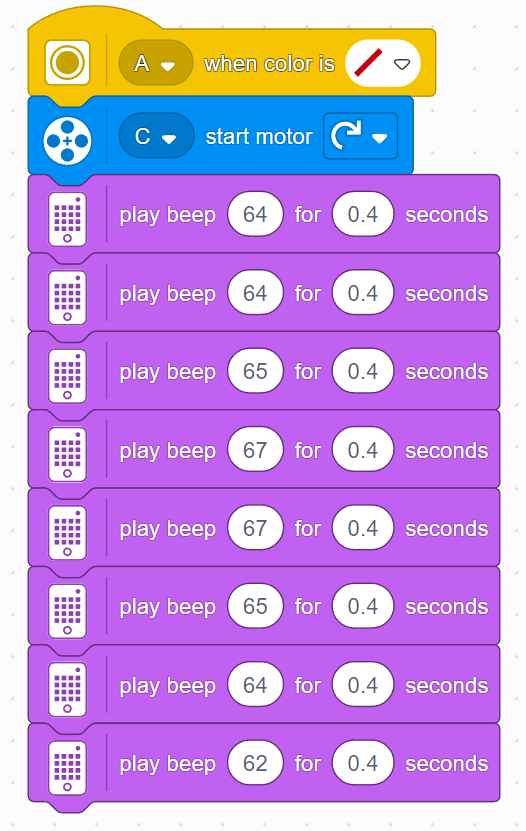
Teacher's Notes: Music Box
Due to the long construction, you need to be careful with time in this lesson. Don’t let the students spend too much time building. If you think you can manage it, you may let them find their own sheet music and adapt it, but we recommend sticking to the short section from Ode to Joy as shown in the tutorial. This melody also serves as preparation for the next lesson, where a ready melody will again be needed. Here’s what the program looks like:
- #2505
- 16 Sep 2025
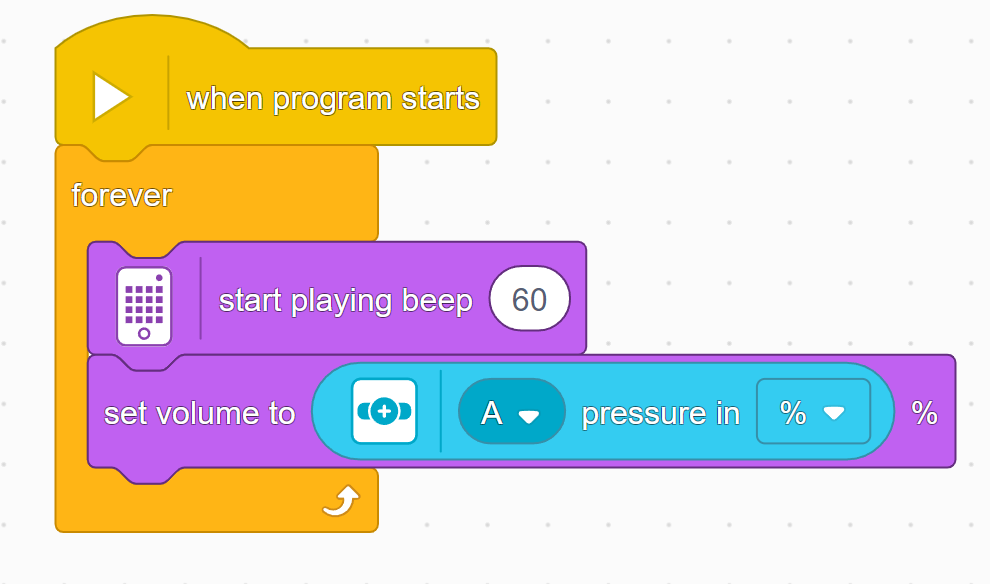
Teacher's Notes: Musical Introduction
Because this is the musical level, it’s important to set some rules for the sounds the robots make. Students often don’t realize how loud it can get, so remind them to keep the volume lower so they can hear the hubs, and to stop their programs in time, since continuous sounds can become quite loud.
In this lesson, students will learn many of the key concepts needed for the rest of the course. That’s why there is little construction and mainly exploration with a single force sensor. Make sure they understand the difference between pitch and volume. Although there are many new blocks introduced, they are mostly simple and similar to previous ones. These blocks will also be used in many future lessons, giving students plenty of time to become familiar with them. By the end of the lesson, students should have tried the following two programs:

- #2502
- 16 Sep 2025
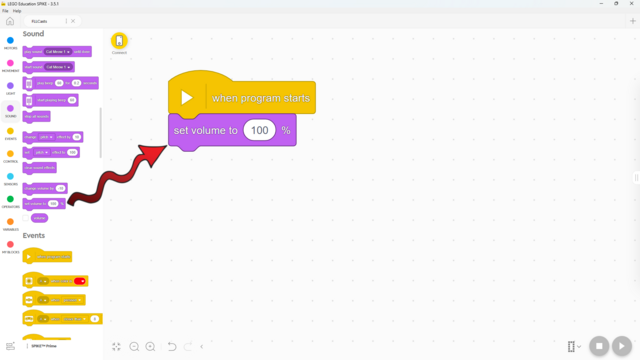
How to use the Set Volume To Block in LEGO SPIKE Prime Word Blocks Software
A big part of a sound is its volume. Here's how to change it!
- #2501
- 16 Sep 2025
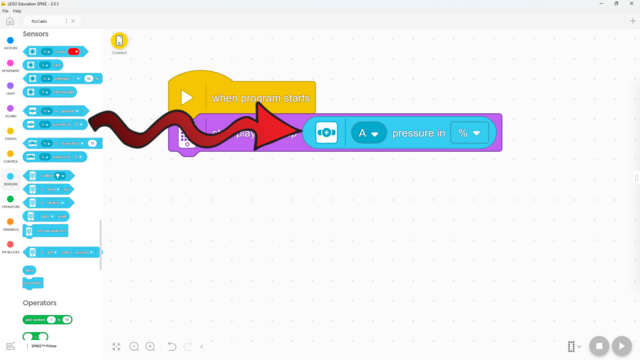
How to use the Force Sensor Pressure Block in LEGO SPIKE Prime Word Blocks Software
The force sensor can detect how hard it’s being pressed! Here’s how:
- #2500
- 16 Sep 2025
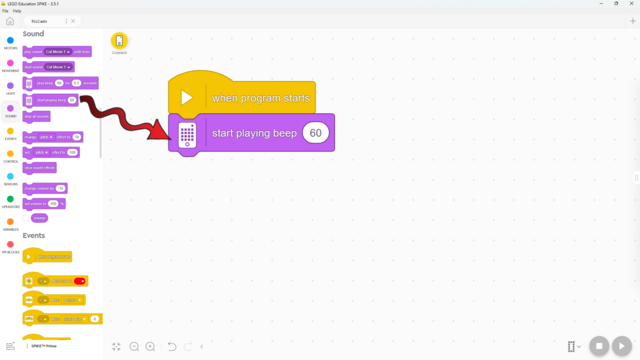
How to use the Start Playing Beep Block in LEGO SPIKE Prime Word Blocks Software
Did you know that your hub can play a sound? Here's how!
- #2499
- 16 Sep 2025
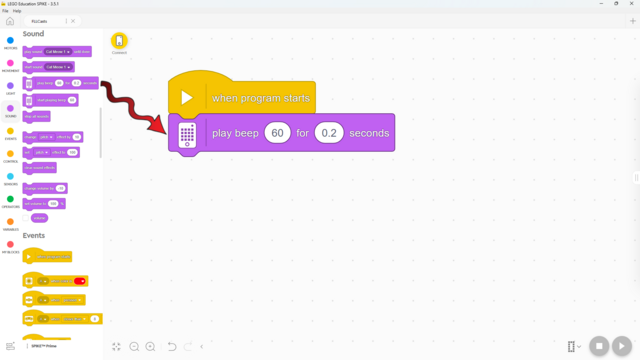
How to use the Play Beep for Seconds Block in LEGO SPIKE Prime Word Blocks Software
Did you know that your hub can play a sound? Here's how!
- #2497
- 16 Sep 2025
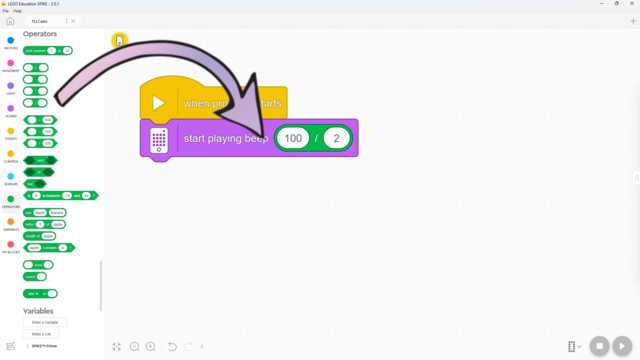
How to use the Division Block in LEGO SPIKE Prime Word Blocks Software
You already know how to do division in mathematics - here’s how to do it in SPIKE Prime!
- #2495
- 16 Sep 2025
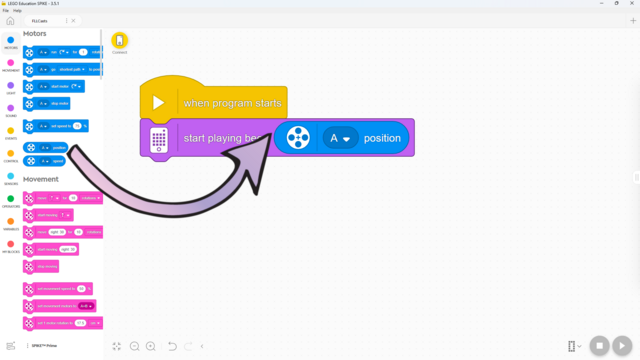
How to use the Motor Position Block in LEGO SPIKE Prime Word Blocks Software
Did you know you can use the motors as sensors? Here's how!
- #2494
- 16 Sep 2025
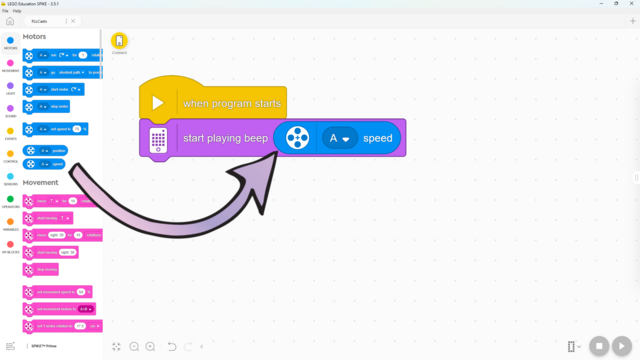
How to use the Motor Speed Block in LEGO SPIKE Prime Word Blocks
Did you know you can use the motors as sensors? Here's how!
- #2483
- 16 Sep 2025

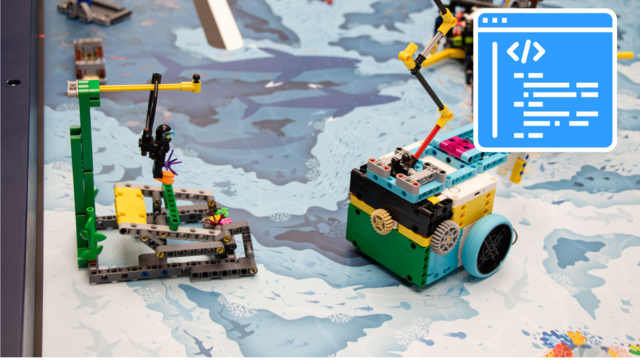
FLL 2024: Full run - Nautiq box robot accomplishing all missions
In this video tutorial, we demonstrate a full run for the FIRST LEGO League 2024-2025 SUBMERGED challenge, completing all missions in a single sequence. Each mission is shown individually beforehand, with close-up views of how the attachments work and the principles behind their design. All attachments are pinless, making them quick to change during the run, though aligning and loading the robot still requires practice. The strategy involves moving from one base to the other while accomplishing as many missions as possible, including retrying those close to base when needed.
While the complete run takes longer than the official 2.5 minutes, the focus here is on demonstrating reliability, consistency, and the trade-offs between time and scoring points. In some cases, missions are skipped to focus on higher-value tasks, but in this run, we aim to complete them all. The result is a strong performance that comes close to the maximum possible score.
- #2460
- 06 Aug 2025
FLL 2024: Programming Nautiq with Word Blocks to Push, Collect, Deliver, accomplishing M01, M02, M03 and M04
The programming process for accomplishing M01 Coral Nursery, M02 Shark, M03 Coral Reef, and M04 Scuba Diver of the FIRST LEGO League 2024-2025 SUBMERGED Challenge is straightforward, despite covering multiple missions in one run. Each mission is accomplished with a simple and reliable approach that minimizes the impact on overall run accuracy.
The code consists mainly of movement blocks and gyro turns, allowing for consistent navigation between mission models. By keeping the programming uncomplicated, the robot can perform pushing, collecting, and delivering tasks efficiently without introducing unnecessary complexity, ensuring a smooth and dependable multi-mission run.
- #2453
- 06 Aug 2025

FLL 2024: Programming Nautiq with Word Blocks to Lift, Deliver, accomplishing M01, M03
The programming process for accomplishing M01 Coral Nursery and M03 Coral Reef of the FIRST LEGO League 2024-2025 SUBMERGED Challenge is straightforward, focusing on controlled movement and stability. The motor-powered attachment lifts the coral tree smoothly to the coral tree support while also delivering reef segments outside the launch area.
The robot moves forward to position itself, raises the coral tree, and then returns to base. To ensure the reef segments remain secure during the run, the program uses slow acceleration and reduced speed when needed. This simple yet reliable approach keeps the sequence easy to execute while maintaining consistency in performance.
- #2452
- 06 Aug 2025

FLL 2024: Programming Nautiq to Collect, Lift, accomplishing M06, M07
The programming process for accomplishing M06 Raise the Mast and M07 Kraken’s Treasure of the FIRST LEGO League 2024-2025 SUBMERGED Challenge is streamlined, focusing on controlled movement and precision. The design of the attachment ensures that the mast is lifted to the correct height while the treasure chest is securely captured.
The code uses simple maneuvering to reach the mission model, but the return path requires special handling. If the robot makes a sharp turn, the chest can be lost, so the program uses light steering to maintain stability while returning to base. This combination of straightforward navigation and careful return control ensures consistent success for both missions in a single run.
- #2451
- 06 Aug 2025

FLL 2024: Programming Nautiq with Word Blocks to Collect, Deliver, Push, accomplishing M05, M09, M14, M12, M03
The programming process for accomplishing M05 Angler Fish, M09 Unexpected Encounter, M14 Sample Collection, M12 Feed the Whale, and M03 Coral Reef of the FIRST LEGO League 2024-2025 SUBMERGED Challenge is streamlined, making it easier to manage even in a large multi-mission run. The design of the two-part attachment system significantly influences how the robot moves, simplifying the code and reducing complexity.
The program is surprisingly simple for such a comprehensive run, with the robot performing a series of maneuvers to collect, deliver, and push mission elements. For maximum accuracy, it uses gyro turns, slow acceleration, and reduced speed in trickier spots to maintain control. By letting the attachments guide much of the interaction, the programming remains clean and reliable, enabling the robot to handle multiple scoring tasks efficiently in a single trip.
- #2450
- 06 Aug 2025

FLL 2024: Programming Nautiq for Push, Lift with Word Blocks accomplishing M8 Artificial Habitat
This programming tutorial focuses on accomplishing M8 Artificial Habitat of the FIRST LEGO League 2024-2025 SUBMERGED Challenge using the Nautiq box robot (a LEGO Education SPIKE Prime robot).
The sequence is optimized to position all four crabs upright with their yellow bases touching the mat for maximum points. The code uses straightforward but highly accurate movement commands, ensuring the robot engages and adjusts the mission model with precision. This dedicated program minimizes errors and allows for consistent high-scoring runs, combining efficient programming with the attachment’s reliable design.
- #2449
- 06 Aug 2025