
Hall Effect Sensor
What Is a Hall Effect Sensor?
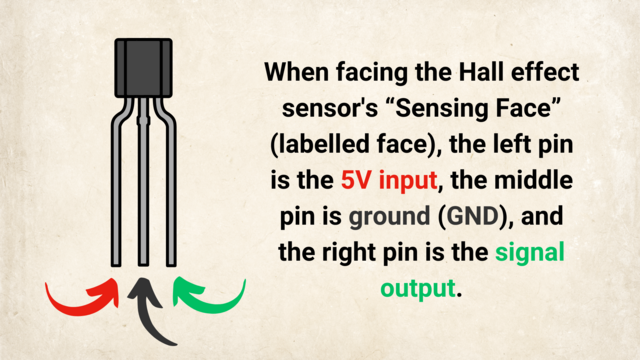
A Hall Effect Sensor is a small electronic component that detects magnets. When a magnet comes close, it sends a signal to other devices, like an Arduino or an LED light. Think of it as a tiny switch that turns on whenever a magnet is nearby.
- #2493
- 12 Sep 2025