

Box Robot Two. Push/Pull attachment with a Rack on the right side
Need to transfer circular into a linear motion. You need a rack. Here is an attachment with a rack for our box robot.
- #511
- 30 Mar 2017
Need to transfer circular into a linear motion. You need a rack. Here is an attachment with a rack for our box robot.

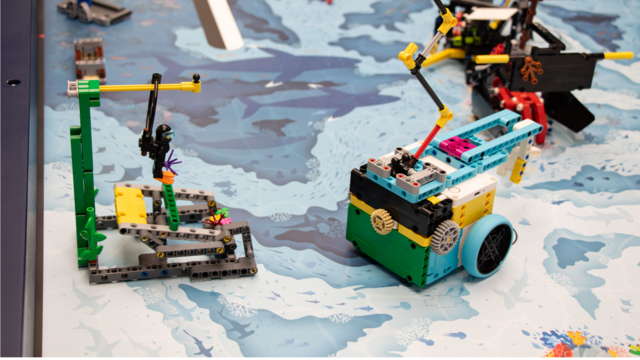
This is a 10 out of 10 video tutorial that focuses on accomplishing M01 Coral Nursery, M02 Shark, M03 Coral Reef, and M04 Scuba Diver of the FIRST LEGO League 2024-2025 SUBMERGED Challenge using the Nautiq box robot (a LEGO Education SPIKE Prime robot).
The robot pushes the shark, flips the coral buds and coral reef, and collects and delivers the Scuba Diver with precision. This efficient multi-mission run is designed for speed and reliability, ensuring maximum points with minimal wasted movement. You can watch the full explaining tutorial here.

Based on feedback from many of you in this episode I would like to show you how to build an active attachment that changes the orientation of a gear wheel placed vertically to a gear wheel placed horizontally. This attachment could be used in competitions and shows a basic principle of changing the orientation. All attachments could follow the same principle.
This video tutorial focuses on accomplishing M01 Coral Nursery, M02 Shark, M03 Coral Reef, and M04 Scuba Diver of the FIRST LEGO League 2024-2025 SUBMERGED Challenge using the Nautiq box robot (a LEGO Education SPIKE Prime robot). The run uses a two-part pinless attachment designed to complete multiple missions in a single sequence. The small angled surface mounted under the robot flips the coral buds from M01 and pushes the shark from M02, while the front arm catches and delivers the Scuba Diver from the coral nursery to the coral reef support.
The back section of the attachment flips the coral reef from M03 using a friction-pin mechanism that stays straight during travel but drops the horizontal arm at the mission model to push the yellow plate and raise the coral reef. Extra axles on the front arm prevent the Scuba Diver from falling during delivery, ensuring reliable scoring. This coordinated multi-mission approach maximizes efficiency by combining pushing, collecting, and delivering into one smooth run.

This video tutorial focuses on accomplishing M01 Coral Nursery and M03 Coral Reef of the FIRST LEGO League 2024-2025 SUBMERGED Challenge using the Nautiq box robot (a LEGO Education SPIKE Prime robot). The aim is to see a consistent accomplishment by lifting the coral tree to the coral tree support and delivering reef segments outside the launch area in one smooth sequence.
The robot uses a motor-powered attachment to lift the coral tree precisely while a side holder secures the collected reef segments. This ensures both missions are completed without losing any pieces during movement. You can watch the full explaining tutorial here.

This is a very interesting idea that is worth sharing with the rest of the teams and the ELM team has provided it to us. Check out how they drop a LEGO human at a specific place.

The attachment builds on previous episodes this time using two LEGO rubber bands. When a lever is released the rubber band exerts pressure on it and moves it in a circular motion. As an example we are solving the 2012 FIRST LEGO League, Senior Solutions, stove mission (which was quite interesting as a mission)

This video tutorial focuses on accomplishing M01 Coral Nursery and M03 Coral Reef of the FIRST LEGO League 2024-2025 SUBMERGED Challenge using the Nautiq box robot (a LEGO Education SPIKE Prime robot). The run uses a pinless motor-powered attachment specifically designed to raise the coral tree to the coral tree support while delivering reef segments outside the launch area. This attachment was chosen after testing multiple designs, and it proved to be one of the most reliable solutions for this task.
The motor-driven lifting mechanism is mounted using long axle pins due to the gearwheel’s position, and a heavy brick is added on top for extra sturdiness, preventing the attachment from popping off during operation. On the side, a simple holder secures the three reef segments collected in previous runs for easy delivery during this mission. This combination allows the robot to lift the coral tree smoothly, place it accurately, and complete the reef segment delivery in a single, well-coordinated sequence.

This tutorial in an animated demonstration of how a LEGO Education SPIKE Prime robot could turn precisely at 90 degrees using the Motion Sensor. The goal of the task is to download the program and rotate at exactly 90 degrees. Because of this precise rotation it is easy to know where your robot is on the field and to program the robot to perform in a reproducible way. To download the program check out the courses in which the tutorial is used.

This video tutorial focuses on accomplishing M06 Raise the Mast and M07 Kraken’s Treasure of the FIRST LEGO League 2024-2025 SUBMERGED Challenge using the Nautiq box robot (a LEGO Education SPIKE Prime robot). The point is to achieve a perfect 10 out of 10 score for these interconnected missions in one smooth sequence.
The robot first secures the treasure chest before fully raising the mast, avoiding the mechanism that would otherwise lock the chest in place. This requires precise timing and control to push, lift, and stop at the correct point, then complete the mast-raising motion. You can watch the full explaining tutorial here.
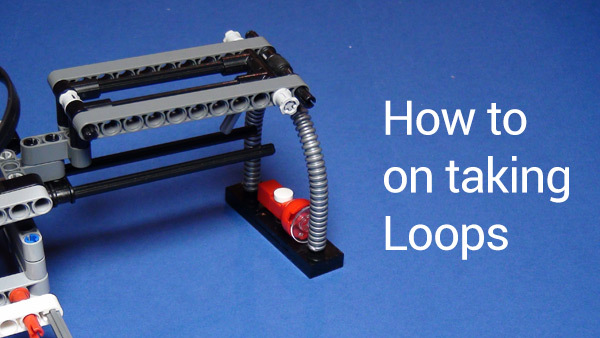
Each year the FIRST LEGO League robotics Competition involves loops. In this video tutorial I will go through the most common way of taking loops, show its disadvantages and suggest another way to do it.

This video tutorial focuses on accomplishing M06 Raise the Mast and M07 Kraken’s Treasure of the FIRST LEGO League 2024-2025 SUBMERGED Challenge using the Nautiq box robot (a LEGO Education SPIKE Prime robot). The run uses a pinless attachment connected to the bottom of the robot, featuring side guides with stoppers for precise mast lifting and a central rubberized section to catch the treasure chest.
The challenge in this run is to collect the treasure before raising the mast fully, as the mission model locks the chest if the mast is lifted too far too soon. The robot must push and lift with great precision, stopping at exactly the right point to avoid triggering the lock, then continue raising the mast to complete the mission. This sequence demonstrates careful mechanical design, accurate programming, and precise timing to accomplish two interconnected missions in one smooth run.

This is one of the very interesting attachments by the ELM team. It is using rubber bands and some rubber to precisely drop the chicken. Very interesting way. Check it out and try to learn from it.

In this video tutorial, the MiniBox box robot accomplishes M14 and M15 of the FIRST LEGO League 2023-2024 MASTERPIECE Challenge robotics competition. The robot is a LEGO Education SPIKE Prime robot. In this run, the robot delivers the LEGO minifigures to their designated places.

In this video lesson I am building a LEGO Mindstorms EV3 active attachment powered by a small gear wheel. The attachment could move up and down, it is very useful for collecting objects. It could easily be adapted and used on other robots.
We are making a parallel with Video Lesson 56 from the series and we are also showing ways to improve the stability of an axle which is most of the time neglected, but could lead to great problems.

In this video tutorial, the MiniBox box robot accomplishes M08, M14, and M15 of the FIRST LEGO League 2023-2024 MASTERPIECE Challenge robotics competition. The robot is a LEGO Education SPIKE Prime box robot. In this run, the robot delivers the LEGO minifigure to its designated place and then pushes the M08 camera down the track to shoot the movie scene.

In this Episode, we stop at the pinless attachments for the Box Robot 2 and especially for the constructing a frame. This frame is then used for further extending the robot with attachments.

This is a 10 out of 10 tutorial in which the MiniBox accomplishes M14 and M15 of the FIRST LEGO League 2023-2024 MASTERPIECE Challenge robotics competition. The robot is a LEGO Education SPIKE Prime box robot. In this run, the robot should consistently and reliably deliver the LEGO minifigures to their designated places.

This robot could quite possibly be build from a single EV3 core and EV3 resource sets. It uses fewer parts and only three motors. There are additional parts that could be skipped when building the robot and we have added these parts only as to make the construction more complete.

This is a 10 out of 10 tutorial in which the MiniBox accomplishes M08, M14, and M15 of the FIRST LEGO League 2023-2024 MASTERPIECE Challenge robotics competition. The robot is a LEGO Education SPIKE Prime box robot. In this run, the robot should consistently and reliably deliver the LEGO minifigure to its designated place and then push the M08 camera down the track to shoot the movie scene.

In this tutorial we demonstrate how a loops mission could be accomplished with a Push/Pull Attachment. The robot attachment could be adapted to other missions at FIRST LEGO League/World Robotics Olympiad and other robotics competitions that require push/pull. The principle is the same. The tutorial uses Luly, small LEGO Education SPIKE Prime competition robot with 3D building instructions as a robot base.

This is a 10 out of 10 tutorial in which we accomplish M04, M14, and M15 of the FIRST LEGO League 2023-2024 MASTERPIECE Challenge. We use the MiniBox, a LEGO Education SPIKE Prime box robot. The goal of the robot is to consistently and reliably deliver the LEGO minifigures to their designated place and then press down the M03 platform to trigger the immersive experience for the viewer in the mission model.

In this video tutorial, we demonstrate a full run of all the missions in the FIRST LEGO League 2023-2024 MASTERPIECE Challenge robotics competition, using the MiniBox - a LEGO Education SPIKE Prime robot.
These kinds of runs are extremely useful for teams looking to see how they can tackle the entire range of missions, pushing their accuracy, speed, and self-control to the limit.

We extract the Proportional Line Following algorithm into a new block with parameters. This allows us to experiment with the Threshold, Constant Speed and Relaxation Coefficient. You can now easily use the block in you other programs without having to implement it.

In this video tutorial, we show how to accomplish M03 of the the FIRST LEGO League 2023-2024 MASTERPIECE Challenge competition. The robot featured is the Chain Monster box robot, built from LEGO Education SPIKE Prime.
This tutorial focuses specifically on the M03 Immersive Experience as part of a larger run, making it easier for you to learn and replicate the robot's behavior.

This video tutorial contains the final 2 programs for moving straight with a LEGO Mindstorms EV3 robot. The first program is for proportional compensation that just keeps the robot orientation straight, while the second program is for Integral compensation that returns the robot to the straight line when the robot makes a mistake.

In this video tutorial, we demonstrate how to accomplish the second part of M8 of the the FIRST LEGO League 2023-2024 MASTERPIECE Challenge competition. We use the Chain Monster box robot built from LEGO Education SPIKE Prime.
The goal of the mission is to push the M08 rolling camera up the rails. Let's see how the robot does it.