English
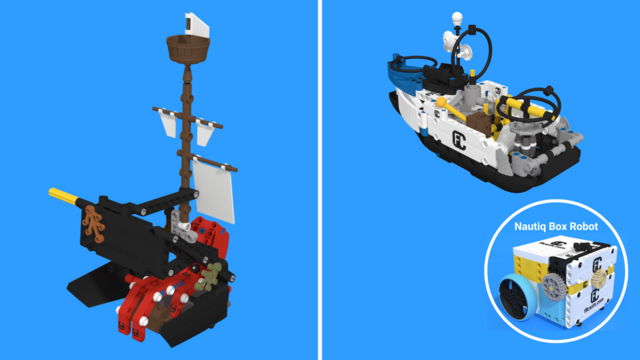
In this video tutorial from FIRST LEGO League 2024-2025, SUBMERGED competition, we use our Nautiq Box robot to accomplish two missions that are connected in a very unique way. First, we have a mission where we have to raise the mast. And when raising it, we must push and lift, but only to a certain point. If we push further, it will fall. So we should be very precise of how exactly we use the robot to push and where to stop, then push and lift. This is like an interesting way to have the mission. But there is something more interesting. There is a treasure. There is a treasure that's hidden as we raise. What should happen there is that we should also collect the treasure. And the mission model is connected in such a way that when we raise the mast, what will happen there is that we will probably lock our treasure.
If we raise too far, it will lock the treasure. You see the red beams that will fall and will lock the treasure. So we must somehow collect the treasure before we raise the mission model. And we should continue then raising the mission model. So it's extremely complex as a mission, and there are some interesting ways to accomplish it. Let's see how we do it.
Start from base, move, lift, collect the treasure, return back to base. Nice. Because the camera run is quite fast, let's do the same thing, but slowly. We move with the robot, we have the attachment, and as we move forward, it will push and lift at the same time until we open the mission model enough so that we can connect with the treasure.
We don't want to push it any further. That's why we have these yellow beams at the end of the lifting attachment. That will prevent the mission model to go further and fall back, because it shouldn't. As we move forward, if we have enough power, we also lift the internal red beams and we collect the treasure. Again, move forward, we lift. We have this rubber parts at the front, and as we move, we connect with the treasure, and then we can go back and return it back to base. Quite interesting. A couple of movements at once. Hope this is helpful and see you in the next tutorial.