Content for EV3



Demolition. Destroying and Gathering. FIRST LEGO League Trash Trek 2015
Many FLL competitions have a mission for demolition. You should always destroy something, but destroy it in a regulated manner and probably collect the destroyed mission model after that.
- #276
- 24 Apr 2016

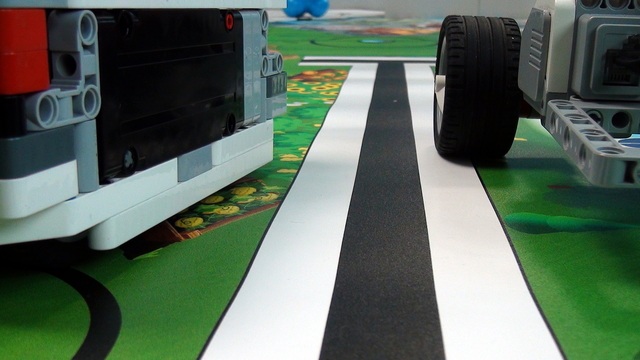
Gapped & Crossed Line Following. Part 12. Escape the "Lost" state
The final video from the course. The robot escapes the state where it is lost. This happens if it can not continue in any direction.
- #215
- 08 Feb 2016

Store in Arrays. WRO Elementary 2013.
After we have introduced a menu in the previous video, this video focuses on storing the values in an array. It presents a basic use of arrays.
- #221
- 24 Jul 2016

EV3 basics course. Gyro Sensor. Turn at an angle (part 1)
The Gyro sensor in LEGO Mindstorms EV3 sets is new for the sets and we answer basic questions about its usage. The sensor detect when the whole constructions turns at a particular angle, but there are a number of gotchas in using it.
- #154
- 01 Jan 2017

Physics in LEGO Mindstorms Energy Accumulation and Conservation Part 5 Energy added to the system
The energy accumulated in the construction is about 2-3 Joules. In this first video we ask the question "How can we keep the energy in the system". How many Joules of energy should we input from the motor in order to keep the energy in the system.
- #119
- 10 Dec 2015

WRO Robot with Attachment 1
The first of a series of attachments that we add to a World Robotics Olympiad LEGO Mindstorms Robot. The attachment is an example for collecting ping-balls. The robot and the attachment are in the same construction. The attachment is a base for a container that could be extended.
- #44
- 19 Dec 2015
- 1
Front or Rear wheel drive for more precise LEGO Mindstorms robot movement?
Should the robot be with a Front Wheel Drive or a Rear Wheel Drive to make it more precise? The answer is - front wheel will probably give you better results, but the wheel drive is not the most important thing. In this video tutorial on the LEGO Mindstorms Robots, we will do a few experiments to discuss the influence of the wheel drive on the precision of the movement.
- #651
- 09 Jan 2018

Keep the LEGO Mindstorms robot orientation straight by using the Gyro Sensor. Proportional Part.
The first part of making the robot move straight is to keep it oriented straight. While it moves it could make an error and turn slightly to the right and then the program should turn in back to the left to make its orientation straight. In this video tutorial, we would discuss how to implement a program to keep the robot orientation straight even when we are pushing or pulling it to either side and in the same time it has different wheels.
- #653
- 10 Jan 2018

Oya Bot - Compact Motor Attachment LEGO Robot
This LEGO Mindstorms robot base is small, compact and packed in a very small volume. The goal of this constructions is to be used as a base and to show yet another way to experiment with adding motors to the brick.
- #334
- 18 Dec 2017

Strange Bot - LEGO Robot with two motors in reverse direction
This LEGO Mindstorms robot is strange. Can you guess what is strange about it?... The motors are placed in a reverse direction. One of the motors is facing "forward" while the other one is facing "backwards". This means that if you make the robot move forward with a Tank Block in the EV3-G software it will just rotate. To make the robot move forward, you will have to make one of the motors rotate forward and the other one - rotate backwards.
The goal of this robot is to teach students that motors could be placed in many different ways. It is not always the case that the two motors face the same direction. Also, it is quite fun.
- #361
- 29 Dec 2017

Clank - LEGO EV3 Ammo Truck
Building instructions for a LEGO Truck. The robot is presented as an Ammo Truck but it can be used for transporting various other objects, too. The construction has a rear drive with each of the rear wheels driven by a Large Lego Motor. The front wheels steer using a Medium Lego Motor. The Brick is placed at the front of the construction which gives the opportunity to easily attach different sensors, based on the task.
- #461
- 30 Mar 2018

Robotics with LEGO - Level 3.5 - Measuring tools
The sixth level of the Robotics with LEGO curriculum for students in sixth or seventh grade.
In this level, we introduce student-created myBlocks. Any functionality that is used in several places in a program is grouped into myBlock thus shortening the program's length. Students create blocks that return the result of calculations as an output parameter. Input parameters can change the calculations in the myBlocks. The robot constructions measure physical properties like linear or rotational speed, the fuel level in a tank, or length, area and volume.
- 58
- 0:00
- 185

Cole - LEGO Mindstorms EV3 robot base with a frame
This is a vehicle that is used to help you to learn programming, to experiment with addons, attachments and constructions. It has a frame. Which is nice. A frame is always nice.
It has two wheels at the back, but this is needed only if you have them.
- #741
- 04 Apr 2019

FLL 2018: How to accomplish M06 (precisely push) from FIRST LEGO League 2018 Into Orbit. Review
This video tutorial contains a details explanation on how we accomplish the FIRST LEGO League 2018-2019 Into Orbit mission called M06. SPACE STATION MODULES. This again is a very interesting mission from the competition from which we could learn a lot of basic principles in the field of robotics.
- #1262
- 27 May 2019

Robotics with LEGO - Level 2.5 - Maritime Journey
The fourth level of the Robotics with LEGO curriculum for students from fifth to twelfth grades.
In this level students focus on the rotational sensor that is part of every motor in the robotics set. Students also learn to use the fourth sensor in the robotics set - the gyro sensor.
First few robot constructions imitate sea-animals and their behavior. Students create programs that check whether the robot's claws or pecks have successfully caught an object. That sensor in the motors allows the robots to go back in their lairs even after the use of unlimited movement. The rest of the robots are modeled after boats, yachts, and ships. With the help of the gyro sensor, students can set a course for their robots to a given angle and can detect deviations from the course. In open seas, there may be sea-monsters and the robots are being programmed to detect a sudden change in acceleration with the help of the said sensor.
- 42
- 3:52
- 133

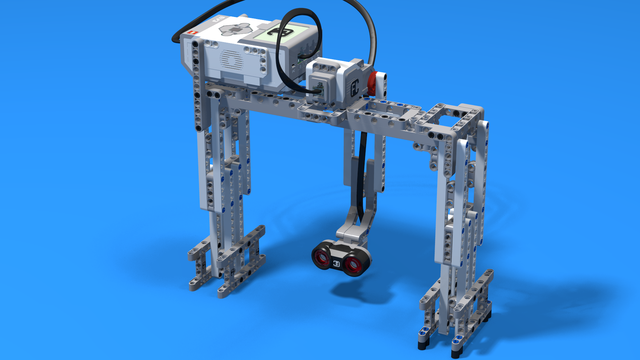
Five-minute robot + rails!
Motivated by the five-minute robot, this robot has its own rails!
- #1044
- 22 Jun 2020

FLL 2019: Accomplish every time. M07 Swing. 10 out of 10 successful runs
This video is part of a series where we show you how our Box Robot accomplished the M07 Swing mission 10 times. This mission has a black and white line parallel right next to it, the only thing you need to figure out is how to avoid the first supporting beam of the swing. The Dominator robot waits to be clear of the beam and then uses the x-y movement of its front mottors to position the lever so it pushes the swing loose. After that the robot moves back and is ready for action again.
- #1641
- 07 Aug 2020

World Robotics Olympiad (WRO) Junior-High 2015. Treasure Hunt. Review of solutions with explanations
Moving in a grid of objects. That's the large challenge of the World Robotics Olympiad 2015 Junior-High 2015. It's called Treasure Hunt. In this playlist we present an example solution to it. In the first video we would build a robot that can collect the boxes (treasures). The robot would also be able to move around the treasures.
- 5
- 27:26
- 0