Content for EV3



Demolition. Destroying and Gathering. FIRST LEGO League Trash Trek 2015
Many FLL competitions have a mission for demolition. You should always destroy something, but destroy it in a regulated manner and probably collect the destroyed mission model after that.
- #276
- 24 Apr 2016

Gapped & Crossed Line Following. Part 12. Escape the "Lost" state
The final video from the course. The robot escapes the state where it is lost. This happens if it can not continue in any direction.
- #215
- 08 Feb 2016

Store in Arrays. WRO Elementary 2013.
After we have introduced a menu in the previous video, this video focuses on storing the values in an array. It presents a basic use of arrays.
- #221
- 24 Jul 2016

EV3 basics course. Gyro Sensor. Turn at an angle (part 1)
The Gyro sensor in LEGO Mindstorms EV3 sets is new for the sets and we answer basic questions about its usage. The sensor detect when the whole constructions turns at a particular angle, but there are a number of gotchas in using it.
- #154
- 01 Jan 2017

Physics in LEGO Mindstorms Energy Accumulation and Conservation Part 5 Energy added to the system
The energy accumulated in the construction is about 2-3 Joules. In this first video we ask the question "How can we keep the energy in the system". How many Joules of energy should we input from the motor in order to keep the energy in the system.
- #119
- 10 Dec 2015

WRO Robot with Attachment 1
The first of a series of attachments that we add to a World Robotics Olympiad LEGO Mindstorms Robot. The attachment is an example for collecting ping-balls. The robot and the attachment are in the same construction. The attachment is a base for a container that could be extended.
- #44
- 19 Dec 2015
- 1
Front or Rear wheel drive for more precise LEGO Mindstorms robot movement?
Should the robot be with a Front Wheel Drive or a Rear Wheel Drive to make it more precise? The answer is - front wheel will probably give you better results, but the wheel drive is not the most important thing. In this video tutorial on the LEGO Mindstorms Robots, we will do a few experiments to discuss the influence of the wheel drive on the precision of the movement.
- #651
- 09 Jan 2018

Keep the LEGO Mindstorms robot orientation straight by using the Gyro Sensor. Proportional Part.
The first part of making the robot move straight is to keep it oriented straight. While it moves it could make an error and turn slightly to the right and then the program should turn in back to the left to make its orientation straight. In this video tutorial, we would discuss how to implement a program to keep the robot orientation straight even when we are pushing or pulling it to either side and in the same time it has different wheels.
- #653
- 10 Jan 2018

Оя бот – ЛЕГО робот с компактен мотор
Базата на този ЛЕГО Mindstorms робот е малка, компактна и с особено малък обем. Целта на конструкцията е да се използва като база и да се покаже още един начин за експериментиране, като се добавят мотори към блока.
- #334
- 18 Dec 2017

Странен робот - LEGO робот, който има два мотора, разположени в противоположни посоки
Този LEGO Mindstorms робот е странен. Можете ли да познаете какво е толкова странно? Моторите са разположени в противоположни посоки. Един от моторите гледа „направо“, докато другият – „назад“. Това означава, че ако искате роботът да се движи напред посредством Tank Block в EV3-G софтуера, той просто ще се върти. За да накарате робота да се движи напред, трябва единият мотор да се върти напред, а другият – назад.
Целта на този робот е да научи учениците, че моторите могат да се поставят по най-различни начини. А не само в една и съща посока. Също така, това е много забавно.
- #361
- 29 Dec 2017

Кланг - Лего EV3 Военно-транспортен камион
Инструкции за конструиране на камион от ЛЕГО. Камионът е замислен като военно-транспортен, но може да бъде използван за транспортиране на най-различни предмети. Конструкцията е със задно задвижване, като всяко от задните колела е задвижвано от по един голям ЛЕГО мотор. Предните колела завиват с помощта на среден мотор. Брикът е закрепен отпред на конструкцията и позволява допълнителното закрепване на различни сензори, в зависимост от целта.
- #461
- 30 Mar 2018

Роботика с LEGO - Ниво 3.5 - Умни измерващи устройства
Ниво 3.5 е шеста част от курса по “Роботика с лего” предназначена за ученици от 5-ти, 6-ти и 7ми клас.
В това ниво започваме да въвеждаме работа със собственоръчно създадени програмни блокчета. Функционалност, която се използва на няколко места в програмата се групира в собствено блокче и скъсява дължината на програмите. Учениците създават блокчета, които връщат изчислена информация чрез изходен параметър. Към собствените блокчета се добавят и входни параметри, които променят изчисленията вътре в тях. Всичко това се случва около роботи, които измерват различни физически величини, като скорост на движение или въртене, нивото на гориво в резервоар, както и дължина, площ, и обем.
- 58
- 0:00
- 185

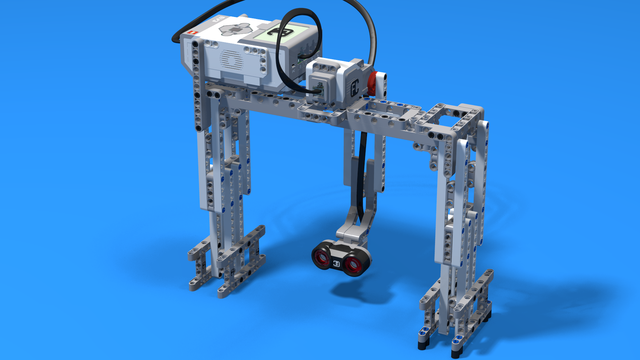
Cole - LEGO Mindstorms EV3 robot base with a frame
This is a vehicle that is used to help you to learn programming, to experiment with addons, attachments and constructions. It has a frame. Which is nice. A frame is always nice.
It has two wheels at the back, but this is needed only if you have them.
- #741
- 04 Apr 2019

FLL 2018: How to accomplish M06 (precisely push) from FIRST LEGO League 2018 Into Orbit. Review
This video tutorial contains a details explanation on how we accomplish the FIRST LEGO League 2018-2019 Into Orbit mission called M06. SPACE STATION MODULES. This again is a very interesting mission from the competition from which we could learn a lot of basic principles in the field of robotics.
- #1262
- 27 May 2019

Роботика с LEGO - Ниво 2.5 - Морски Пътешествия
Четвъртото ниво от учебната програма по LEGO роботика за ученици от пети до дванадесети клас.
В това ниво учениците се фокусират на работа със сензора за завъртане, който се намира във всеки един двигател от комплекта. Освен това се запознават с работата на четвъртия сензор в комплекта по роботика - жироскопичният сензор.
Първите роботи имитират морски животни и техните поведения. Създават се програми, които засичат дали животните успешно са хванали нещо в щипките или човките си. Сензорът в двигателите позволява на роботите да се връщат успешно назад в леговищата си дори и след използване на неограничено движение. Изграждат се и роботи-лодки, яхти и платноходи. С помощта на жиро-сензора учениците насочват роботите по курс по определен ъгъл и засичат отклонения от курса. В открито море може и да има и морски чудовища и корабите им са програмирани да засичат рязка промяна в ускорението, с помощта на същия сензор.
- 42
- 3:52
- 133

Петминутен робот + релси!
Мотивиран от петминутния робот, този робот си има собствени релси!
- #1044
- 22 Jun 2020

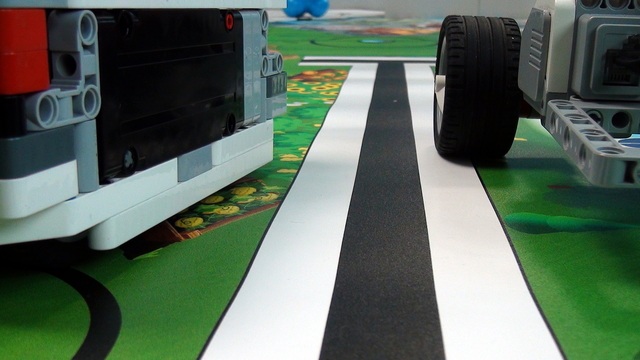
FLL 2019: Accomplish every time. M07 Swing. 10 out of 10 successful runs
This video is part of a series where we show you how our Box Robot accomplished the M07 Swing mission 10 times. This mission has a black and white line parallel right next to it, the only thing you need to figure out is how to avoid the first supporting beam of the swing. The Dominator robot waits to be clear of the beam and then uses the x-y movement of its front mottors to position the lever so it pushes the swing loose. After that the robot moves back and is ready for action again.
- #1641
- 07 Aug 2020

World Robotics Olympiad (WRO) Junior-High 2015. Treasure Hunt. Review of solutions with explanations
Moving in a grid of objects. That's the large challenge of the World Robotics Olympiad 2015 Junior-High 2015. It's called Treasure Hunt. In this playlist we present an example solution to it. In the first video we would build a robot that can collect the boxes (treasures). The robot would also be able to move around the treasures.
- 5
- 27:26
- 0