

How to use LEGO Mindstorms Clutch
A clutch is a mechanical device that is used for engaging or disengaging power transmission. Now we will see how we can make such a device using LEGO.
- #908
- 30 Jul 2018
Every teacher/instructor can conduct classes with students using these resources. You need to motivate and organize the students. We provide the technical theory, tasks, instructions, programs and everything needed.
A clutch is a mechanical device that is used for engaging or disengaging power transmission. Now we will see how we can make such a device using LEGO.

The robot should park in the parking positioned in the north-east corner of the field.

At the end of the match the robot is completely in the parking area in the north-east corner of the field: 50 points.

In this course, you will work with other students in the group. These might be your classmates, teammates, or students you know from other activities. It is important to know your group so that you can work together with them in the best possible way.

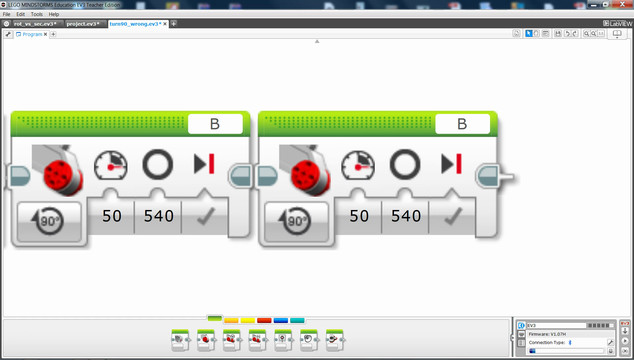
The 90-degree turn of the robot is different from 90-degree turn of the motor!

Try to add a touch sensor to the robot on your own.

As the name indicates, ultrasonic sensors measure distance by using ultrasonic waves. One of the “eyes” on the sensor head is the transmitter and emits an ultrasonic wave and the other “eye” is the receiver which receives the wave reflected back from the target.

Program the robot to move forward by 50cm (20 inches).

A spin turn is a turn around the center of the robot. Let's learn how to program it.
The FIRST LEGO League competition is similar each year. With a little experience you could accomplish most of mission. The goal of this episode is to introduce you to the course, its purpose and approach.

Specific challenge on programming the robot to move as a Yo-Yo
How to search for an unknown value with the fewest possible tries.
The next step of lifting a robot to a mission model is to try to use a rack.

We've already build a number of resources for lifting at FLLCasts.com. But at the end of this course we would have a robot that lifts itself and hangs on the mission model.

Build a rack and try to lift the robot with this rack.

How to change the direction of a beam from horizontal to vertical.

How can you be sure your image on the display is seen when the program ends?

We have the following behavior expectations from you during this course:
You ask the question.
You will probably err before you succeed.
You should work as a team. Share solutions with others, help them and allow them to help you.
When the teacher speaks, this is important to everyone.
You should read your lesson before you come to class.

In this tutorial, we would drive the scissors mechanism and there are a number of rules that we must follow

How to make the robot stay idle while the program is still running.

The final way for lifting our box robot is by using a scissors mechanism. In this Episode, we would discuss the benefits and advantages of this mechanism.

We will build the EasyBot quick robot and will explain how to follow building instructions.

There are some fundamental rules that we advise you to follow while organizing this course with students. Let's look at them.

We will show you the most reliable way to turn with your robot.

In this episode we will show you how to build the FiveMinuteBot. We will make a quick overview of this Mindstorm Robot.

Don't limit yourself to the box and think of different ways to lift the robot.
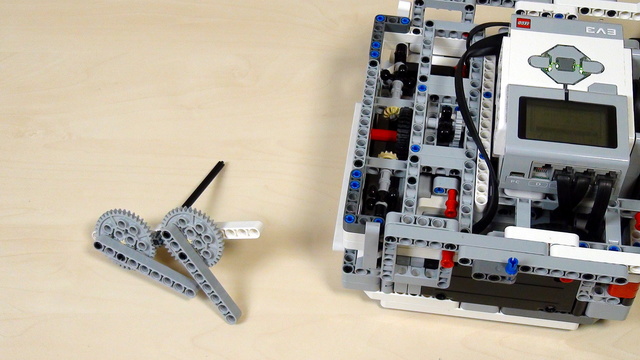
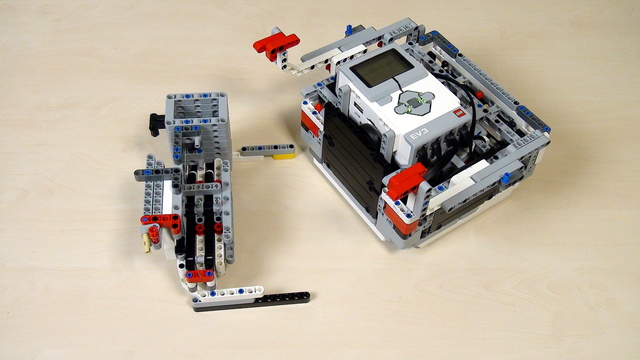
Time to lift the robot. The first approach is by using the 40 teeth gear wheels that come with the LEGO Mindstorms EV3 and NXT robotics sets.
