This video tutorial focuses on accomplishing M13 Change Shipping Lanes, and partially M09 Unexpected Encounter and M12 Feed the Whale of the FIRST LEGO League 2024-2025 SUBMERGED Challenge using the Nautiq box robot (a LEGO Education SPIKE Prime robot).
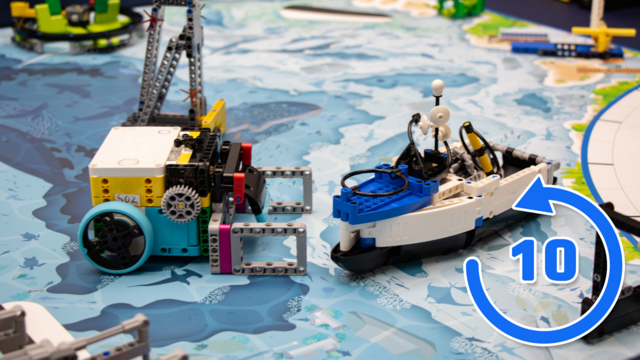
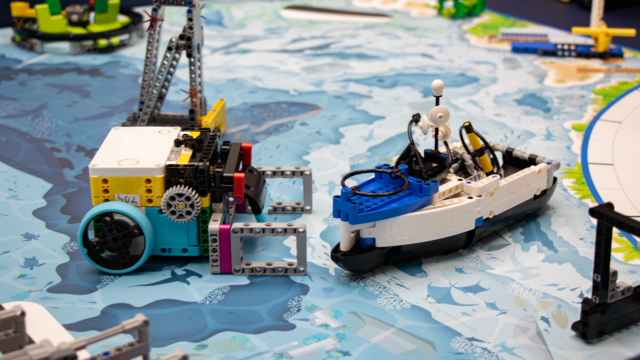
In this run, the robot flips the shipping lane model, collects the small Krill, and retrieves the Unknown Creature from the field by pushing on the mission model. These tasks are executed with precision to ensure that the robot not only scores the primary mission points but also safely returns the collected elements back to base. The sequence is optimized to minimize travel time between missions while maintaining accuracy and control over the robot’s attachments.
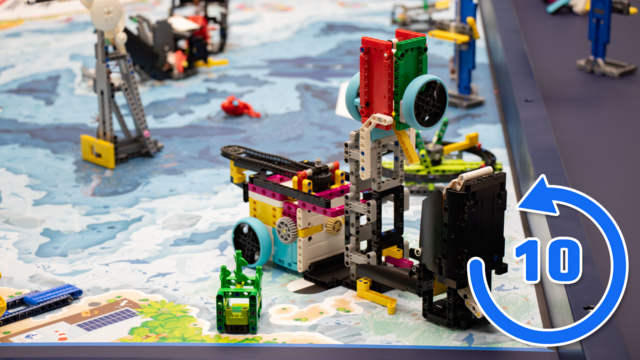
We use a pinless, three-in-one design attachment for completing multiple missions in one run. At the front, an angled rubber band mechanism handles M13 Change Shipping Lanes, allowing the robot to launch straight from base without extra positioning.
On one side, a passive curtain mechanism like a cage captures the single Krill for M12 Feed the Whale. On top, a secure basket catches the Unknown Creature from M09 Unexpected Encounter after a push with the robot’s back. The attachment is optimized for quick and reliable mission execution without additional motors.