
Fish head from LEGO Mindstorms EV3
This is a module that looks like a fish's head. It uses a touch sensor for a mouth and is otherwise purely cosmetic. The module is used in Piscis - a LEGO Mindstorms EV3 Fish robot.
- #974
- 24 Jan 2020
This is a module that looks like a fish's head. It uses a touch sensor for a mouth and is otherwise purely cosmetic. The module is used in Piscis - a LEGO Mindstorms EV3 Fish robot.

This module is made to look and move like a real ship's sails! The module consists of two masts that are connected so that they move together. The back mast is connected to a medium motor that can move all sails and is also connected to a gyro sensor, that can detect if the whole ship is rotated. This module is used in Yolanda - LEGO Mindstorms EV3 Sailship robot.

This is a module that is made to look like a mantis' pincers and head. The pincers are powered by a medium motor and the head has an ultrasonic sensor for eyes. This module is used in Mantissa, a LEGO Mindstorms EV3 mantis robot.

This is a cool scissor mechanism that looks like the sting of a scorpion. It is powered by a medium motor and at the top there is a touch sensor, to detect if something has been stung! The sting is used in Scorpion - LEGO EV3 Robot.

This module is made to look like a head of a ram made with LEGO Mindstorms EV3. It uses an ultrasonic sensor, which points down as if it is going to attack, as the eyes of the head. It can be combined with other modules to create the perfect ram robot!

This is a mechanical cannon that uses the mechanical strain on the plastic LEGO beams to shoot a ball. Because of that the Ball size is very important. It is made to work with standard balls for a ball pool and even better with 41250 52mm LEGO Ball. The mechanism is powered by an EV3 Large motor.

This is a robot, designed to easily lift a cup, while still holding it upright. The robot uses one motor attached to the brick to lift the cup to any angle you want. The cup we have added is purely cosmetic, but with a few adjustments, you can make it lift real cups. Be careful around liquids though!

This program is for Susan and Mark - a LEGO Mindstorms EV3 T-Rex chasing a car. The program makes the T-Rex wait for the car to reach a certain speed, and then attack it. This is made to resemble the T-Rex's said inability to see slow moving things. The goal of the program is to get the car's cable to stretch, while moving it by hand, when its wheels are turning and without the T-Rex noticing. The detection is made using the current power option on the motor rotation sensor.

This program is for Cardiidae - a LEGO Mindstorms EV3 Clam robot. It provides a solution for the final tasks in Lesson 1, level D1. It makes the clam robot detect when it is being opened and then to close itself.

Chronos means time in Greek.
What's the time? Time to build a cool robot! This robot is made to look like a clock. The two hands are each connected to a motor and are positioned between the two motors. This makes it simple to build, while also being effective in showing how a clock works.
An example program moving the seconds and minutes hands of the clock can be found here.
An example program designed to teach children to read the clock can be found here.

In this course, you don't need robots and programming. In this course, students will experiment with physical and chemical concepts, like balance, forces, gravity, inertia, temperature, ratios, and others.

Motivated by the five-minute robot, this robot has its own rails!

Larvy is a SPIKE Prime robot that moves like a larva or caterpillar. It uses a Large Motor to contract and expand its body, mimicking the crawling motion.
Using two Medium Motors, it rotates four wheels - tilting them sideways or upright as needed - so it can move forward!
A program for the robot can be found here: Program for Larvy - LEGO SPIKE Prime robot
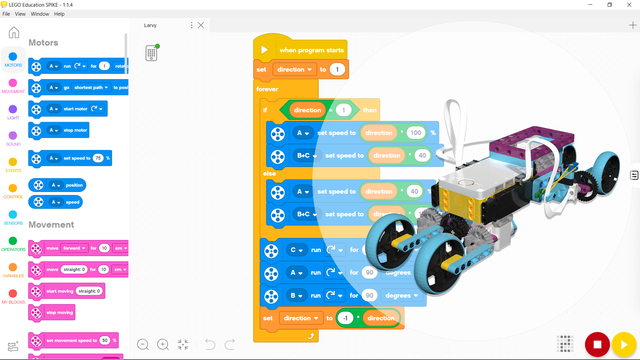
This program makes Larvy - LEGO SPIKE Prime larva robot move forward indefinitely! The movement of this robot is very interesting as it works like a caterpillar or larvae! The program works by repeating 3 movements every cycle of the loop:
You may notice that every movement command does two things, or the same thing but a different direction. That is done using a variable that is either 1 or -1, and that gives the direction that the motors should move. This variable is also used to determine which motor should use full power and which shouldn't so that the robot doesn't break itself!

The Swing Game is a SPIKE Prime robot designed as a two-player game. The goal is for both LEGO figures to reach the center of the swing without tipping it over to either side. Each LEGO figure is mounted on a motor connected to a Technic gear rack, allowing it to move along the swing. The motors are controlled separately—one by a color sensor and the other by a Large Motor. If one player moves too far ahead without the other keeping up, the swing will tip... and it’s game over! Good luck, and have fun!

This program makes the Swing Game - LEGO SPIKE Prime robot move the two LEGO figures based on input from their respective controllers.
The color sensor controller uses the colored plate above it to determine movement. If the sensor detects blue, the LEGO figure moves forward. If it detects purple, the figure moves backward. Any other color will make it stop.
The motor controller works similarly. If the motor turns more than 30 degrees forward, the LEGO figure moves forward. If it turns more than 30 degrees backward, the figure moves backward. If it stays within that range, the figure stops.
The goal of the game is for both LEGO figures to reach the center without tipping the swing to either side. Good luck—and have fun!

Big Wheelster, as the name suggests, is a robot with a big wheel! The large wheel is built using SPIKE Prime baseplates. The robot also features an interesting steering mechanism. At the front, we’ve added a touch sensor to detect obstacles—and hopefully avoid them!
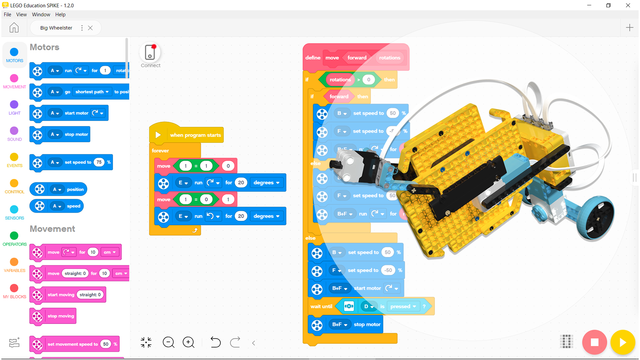
This program makes the Big Wheelster – LEGO SPIKE Prime robot move forward until it bumps into something! This robot features one big wheel powered by two Medium Motors. What’s interesting is that the motors must spin in opposite directions to make the wheel rotate. That’s why we’ve created a My Block to control the robot.
The My Block allows you to set how far the robot should move—either a specific number of rotations or indefinitely (by setting it to 0 rotations). It also includes a logic option for direction: use 1 for forward and 0 for backward.
When the robot detects a bump using the front touch sensor, the program makes it reverse using the back wheels, helping it avoid hitting the same obstacle again!

Tohuru, from Māori, means owl.
Tohuru is a SPIKE Prime robot that grips onto an edge and scans for the nearest object! It uses two Medium Motors to hold onto an edge between its wheels. Its head—made from an Ultrasonic Sensor—is mounted on a Large Motor, allowing it to rotate a full 360 degrees. And most importantly, it looks just like an owl!

This program makes the Tohuru – LEGO SPIKE Prime Owl Robot move like an owl! But what does an owl move like? Well, we figured a key part of an owl’s behavior is firmly holding onto a branch. So, the first part of the program makes the robot grip tightly onto whatever is between its two wheels. After that, the owl begins spinning its head and searches for the closest object. Once it finds something, it stares at it—menacingly—until it moves away!

Calix comes from Latin, meaning cup.
Calix is a robot designed to carry small objects—like a cup—while autonomously following a black line. When most people think about robotics, they imagine machines helping with household chores. Calix is a simple example of that vision brought to life. You can place a cup on it in the kitchen, and it will deliver the cup to the end of the black line!
The robot is powered by two SPIKE Prime medium motors for movement, and it uses a color sensor to follow the line precisely. At the front, a large motor connected to a gear system lifts and lowers the cup, allowing for easy pickup and delivery.
Calix is an elegant demonstration of how even simple robots can be designed to perform useful tasks—making robotics more approachable and practical for everyday life.