
Глава на риба от ЛЕГО Майндстормс EV3
Това е модул, който прилича на глава на риба. Той използва сензор за допир като уста и иначе е изцяло за красота. Модулът се използва в Писцис - LEGO Mindstorms EV3 робот Риба.
- #974
- 24 Jan 2020
Това е модул, който прилича на глава на риба. Той използва сензор за допир като уста и иначе е изцяло за красота. Модулът се използва в Писцис - LEGO Mindstorms EV3 робот Риба.

Този модул е направен да изглежда и да се движи като платна на истински кораб! Модулът се състои от две мачти, които са свързани за да се движат заедно. Задната мачта е свързана към среден мотор, който може да движи всички платна и също е свързан към жироскопичен сензор, който засича дали целият кораб се е завъртял. Този модул се използва в Йоланда - LEGO Mindstorms EV3 робот кораб.

Това е модул, направен да прилича на глава и щипки на богомолка. Щипките се движат с помощта на среден мотор, а главата има ултразвуков сензор за очи. Този модул се използва в Mantissa, a LEGO Mindstorms EV3 mantis robot.

Това е готин ножичен механизъм, който изглежда като жилото на скорпион! Той се задвижва от среден мотор, а на върха на жилото има сензор за допир, с който робота засича дали е ужилил нещо! Жилото се използва в Скорпион - ЛЕГО EV3 робот.

Този модул е направен да изглежда като глава на овен направена с ЛЕГО Майндстормс EV3. Тя използва ултразвуков сензор, който е насочен надолу, все едно овена атакува, като очи. Може да се комбинира с други модули за да се направи перфектният робот-овен!

Това е механично оръдие, което използва напрежение върху пластмасовите ЛЕГО греди за да изстреля топче. Поради тази причина, размера на топчето е много важен. Оръдието е направено да работи с топки за басейн с топки и още по-добре с 41250 52мм ЛЕГО топки. Механизмът се задвижва от голям мотор.

Това е робот, направен да повдига чаша, докато я държи изправена! Той използва един голям EV3 мотор, закачен за брика, за да повдига чашата на всеки ъгъл, който искате! Чашата, която ние сме ви дали е изцяло за красота, но с няколко корекции, робота може да повдига и истински чаши! Все пак внимавайте около течности!

Тази програма е за Сюзън и Марк - LEGO Mindstorms EV3 Т-Рекс гонещ кола. Чрез тази програма Т-Рекс чака колата да стигне определена скорост и тогава да я нападне. Това е направено за да може поведението на Т-Рекс да показва, че той не вижда неща, които се движат бавно. Целта на програмата е да успеете да опънете кабела на колата на ръка, докато колелата и се въртят по земята и Т-Рекс да не ви забележи. Засичането на скоростта на колата е направено с помощта на опцията за текуща мощност на ротационния сензор.

Програмата е предназначена за Сърцевидка - ЛЕГО мида робот. Решава последните задачи от занятие 1, ниво D1. Тя кара мидата да засича, когато някой се опита да я отвори, и се затваря след това.

Хронос означава време на Гръцки.
Колко е часа? Време е да построим готин робот! Този робот е направен да прилича на часовник. Двете му стрелки са свързани към два мотора и са поставени между моторите. Това го прави лесен за сторене, както и ефективен в показването на принципа на работа на часовника.
Примерна програма показваща секундите и минутите от стартирането ѝ може да намерите тук.
Примерна програма предназначена да учи деца да разчитат часовника може да намерите тук.

В този курс не са ви нужни роботи и програмиране. В курса учениците ще правят физични или химически опити, които да им демонстрират понятия като баланс, сили, гравитация, инерция, температура, отношения и други.

Мотивиран от петминутния робот, този робот си има собствени релси!

Ларви е СПАЙК Прайм робот, който се движи като ларва или гъсеница. Роботът използва голям мотор, за да се свива и разпъва! С двата средни мотора, робота завърта 4 гуми по лице и изправени, когато трябва, за да може да се движи напред!
Можете да намерите програма за робота тук: Програма за Ларви - ЛЕГО СПАЙК Прайм робот
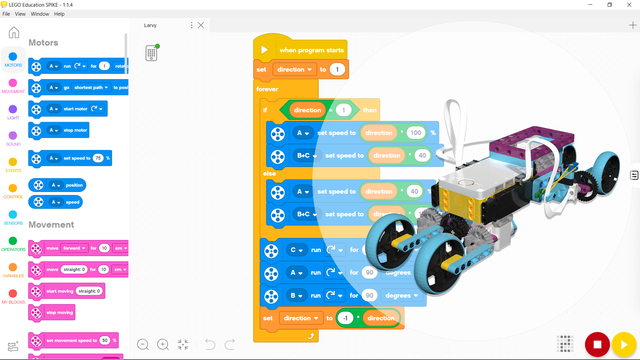
Тази програма кара Ларви - ЛЕГО СПАЙК Прайм робот ларва да се движи безкрайно напред! Движението на този робот е много интересно, тъй като работи подобно на гъсеница или ларва! Програмата работи като повтаря 3 движения всеки цикъл:
Може би забелязвате, че всяка команда прави две неща или същото, но в две посоки. Това се случва с променлива, която е или 1, или -1 и това дава посоката, в която да се движат моторите. Тази променлива също се използва за да се определи кой мотор трябва да използва пълна мощност и кой не трябва, за да не се счупи робота сам!

The Swing Game is a SPIKE Prime robot designed as a two-player game. The goal is for both LEGO figures to reach the center of the swing without tipping it over to either side. Each LEGO figure is mounted on a motor connected to a Technic gear rack, allowing it to move along the swing. The motors are controlled separately—one by a color sensor and the other by a Large Motor. If one player moves too far ahead without the other keeping up, the swing will tip... and it’s game over! Good luck, and have fun!

This program makes the Swing Game - LEGO SPIKE Prime robot move the two LEGO figures based on input from their respective controllers.
The color sensor controller uses the colored plate above it to determine movement. If the sensor detects blue, the LEGO figure moves forward. If it detects purple, the figure moves backward. Any other color will make it stop.
The motor controller works similarly. If the motor turns more than 30 degrees forward, the LEGO figure moves forward. If it turns more than 30 degrees backward, the figure moves backward. If it stays within that range, the figure stops.
The goal of the game is for both LEGO figures to reach the center without tipping the swing to either side. Good luck—and have fun!

Big Wheelster, as the name suggests, is a robot with a big wheel! The large wheel is built using SPIKE Prime baseplates. The robot also features an interesting steering mechanism. At the front, we’ve added a touch sensor to detect obstacles—and hopefully avoid them!
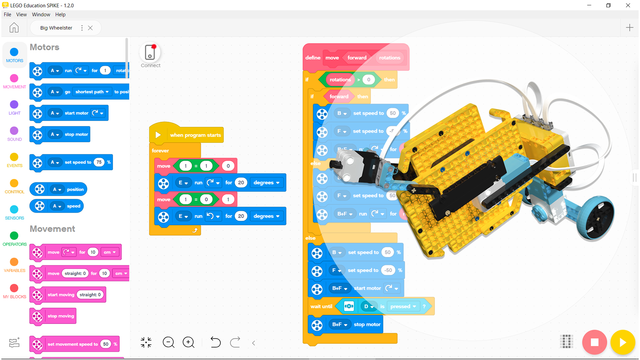
This program makes the Big Wheelster – LEGO SPIKE Prime robot move forward until it bumps into something! This robot features one big wheel powered by two Medium Motors. What’s interesting is that the motors must spin in opposite directions to make the wheel rotate. That’s why we’ve created a My Block to control the robot.
The My Block allows you to set how far the robot should move—either a specific number of rotations or indefinitely (by setting it to 0 rotations). It also includes a logic option for direction: use 1 for forward and 0 for backward.
When the robot detects a bump using the front touch sensor, the program makes it reverse using the back wheels, helping it avoid hitting the same obstacle again!

Tohuru, from Māori, means owl.
Tohuru is a SPIKE Prime robot that grips onto an edge and scans for the nearest object! It uses two Medium Motors to hold onto an edge between its wheels. Its head—made from an Ultrasonic Sensor—is mounted on a Large Motor, allowing it to rotate a full 360 degrees. And most importantly, it looks just like an owl!

This program makes the Tohuru – LEGO SPIKE Prime Owl Robot move like an owl! But what does an owl move like? Well, we figured a key part of an owl’s behavior is firmly holding onto a branch. So, the first part of the program makes the robot grip tightly onto whatever is between its two wheels. After that, the owl begins spinning its head and searches for the closest object. Once it finds something, it stares at it—menacingly—until it moves away!

Calix comes from Latin, meaning cup.
Calix is a robot designed to carry small objects—like a cup—while autonomously following a black line. When most people think about robotics, they imagine machines helping with household chores. Calix is a simple example of that vision brought to life. You can place a cup on it in the kitchen, and it will deliver the cup to the end of the black line!
The robot is powered by two SPIKE Prime medium motors for movement, and it uses a color sensor to follow the line precisely. At the front, a large motor connected to a gear system lifts and lowers the cup, allowing for easy pickup and delivery.
Calix is an elegant demonstration of how even simple robots can be designed to perform useful tasks—making robotics more approachable and practical for everyday life.