How to play Volleyball with LEGO Mindstorms EV3 robots?
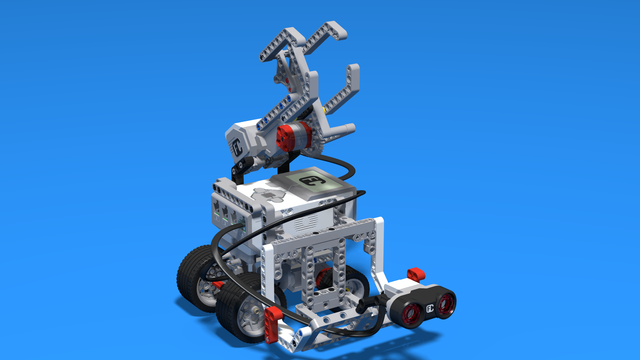
Here is Mintonet. The robot is created to be used in pairs, but you can also build just one and practice your shooting with a box. The robot works with plastic balls between 5 and 7 cm. Using the ultrasonic sensor it can detect either its partner or a box and then it shoots. How many balls can you score?
Introduction
Today our robots are going to have a volleyball lesson.
Do you know how to play volleyball? Have you ever tried?
Volleyball is a popular Olympic sport in which two teams of six players are separated by a net. Each team tries to score points by grounding a ball on the other team's court or the team touch the ball more than 3 times.
How are we going to play volleyball with LEGO robots?
Today our robots will play volleyball. Each robot will be equipped with a basket with which they will “catch” the ball and a cannon with which they will shoot the ball. Anyone who has played volleyball will tell you that players should first warm up by passing the ball. That is what we are going to do. Our robots will start from the opposite corners of the field and will move in parallel towards each other along the edges. Once they detect each other thanks to the ultrasonic sensors, they will shoot a ball and, hopefully, catch the ball shot by the other robot :)
Construction and Theory
Build your robots by using the instructions below. After you finish with the construction part, you will have to measure some key values of the robot.
Mintonet - a LEGO Volleyball robot
Mintonet (engl. Mintonette) comes from the name of the first iteration of volleyball.
The robot can move only forward and backward, without turning, with the help of a large EV3 motor. Another large motor is used to shoot. The robot uses an EV3 ultrasonic sensor to detect its partner and throw a ball at it.
![]()
 After building the robot, close the box to keep the desk clear.
After building the robot, close the box to keep the desk clear.
- Gather all the parts from the desk and put them back in the box.
- Close the box and move it aside so it's out of your way.
Programming and theory
We will start by throwing a ball over the net, which will be resembled by a box. Then, we will try to catch the ball shot by a fellow player while one of the robots is moving and while both robots are moving!
 Tasks to finish a class
Tasks to finish a class
- Take pictures and make videos of your robots
- Disassemble and arrange the robot
- Arrange your workplace
- It is important to arrange the electronics of the robots on the cover of the box.
- Wind up the programming cable so that it is assembled.
- Put the robot cables next to the electronics.
- Wind up the mouse cable around the mouse.
- Wind up the cable of the laptop charger in a way that your teacher will show you.
- When you turn off the computer, leave it next to the robot box.
- Turn off all programs on your computer
- Exit FLLCasts
- Shut down your computer
- Put your chair under the desk.