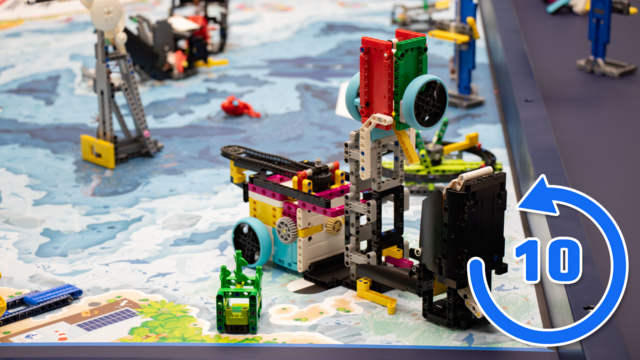
This video tutorial focuses on taking the Research Vessel for M15 of the FIRST LEGO League 2024-2025 SUBMERGED Challenge using Nautiq box robot (a LEGO Education SPIKE Prime robot).
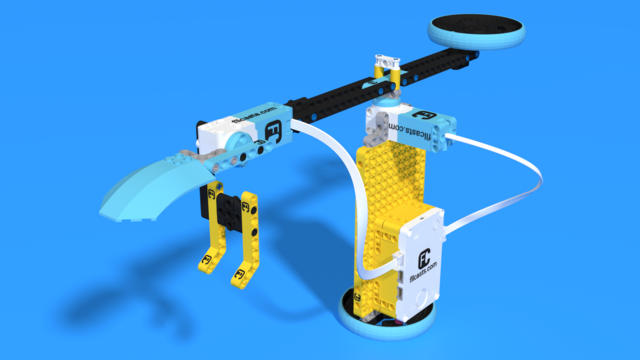
This video tutorial focuses on accomplishing M15 Research Vessel of the FIRST LEGO League 2024-2025 SUBMERGED Challenge using the Nautiq box robot (a LEGO Education SPIKE Prime robot). The run uses a pinless latched attachment mounted under the robot for maximum stability. The attachment features a hook that catches the research vessel and pulls it back to the launch area, after which the hook can be removed and the remaining parts reused for the next run.
Important: Before starting this run, ensure the part that locks the boat for the next run is raised; otherwise, the robot cannot hook the vessel correctly. This simple but effective mechanism allows for a quick and reliable retrieval, setting up the next sequence of missions without additional adjustments.