Когато използваме конструкция, при която два двигателя задвижват двете страни на робота, лява и дясна, трябва да отбележим, че завивайки роботът винаги описва окръжност. В зависимост от начинът на завиване тази окръжност е с определена големина и център. Завоите представляват части от окръжността, която роботът ще опише.

Необходимо е да се абонирате за FLLCasts.com, за да достъпите това видео
- #1341
- 14 Jun 2019
Начини за завиване
1. Завиване по дъга:
Двигател B се движи по-бързо от двигател С. Осъществява се движение, като показаното на схемата:
Този начин на завиване използваме, когато искаме роботът ни да завива плавно и неговите движения да са с формата на дъги или големи окръжности. Характерно за този начин на завой е, че колкото по-бързо се движи двегател B и колкото по-бавно двигател С, окръжността става все по-малка, съответно завоя ни става все по-остър.
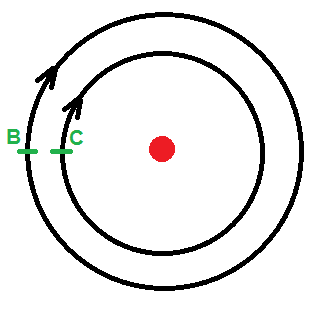
2. Завиване с един двигател:
Когато единия двигател е спрян. Да се върнем отново на първия начин с намалянето на мощност на единия двигател. Какво би станало, ако намалим мощността на двигател С до 0, тоест го спрем? Отговорът е, че роботът ще започне да завива, описвайки следната окръжност:
При този начин на завиване се описва кръжност около спрения двигател. За разлика от първия начин, където размера на окръжността се определяше от мощностите на двигателите, при този начин окръжността винаги е еднаква и ние винаги знаем нейния радиус. Той е равен на разстоянието между гумите на робота и на схемата е отбелязан със синьо.
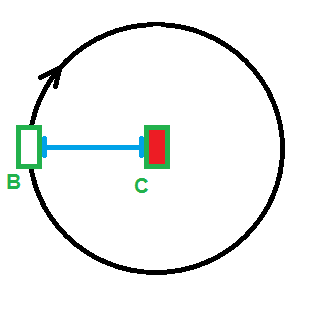
3. Завиване на място:
Движение на двигателите в различни посоки. При този вариант единият двигател се движи напред, а другият назад. Роботът се движи по начина, показан на схемата:

При този начин на завиване, описаната от робота окръжност е с център в средата на разстоянието между двете гуми, а радиуса на окръжността е половината от разстоянието между гумите. Също можем да кажем, че роботът се върти на място. Този начин на завиване използваме, когато нямаме много място за маневриране, например тесен коридор или тунел.
Курсове и занятия включващи този Урок
Този Урок е използван в следните курсове и занятия.

Роботика с LEGO - Ниво 1.0 - Приключение в Космоса
Първото ниво от учебната програма по LEGO роботика за ученици от пети до дванадесети клас.
В нивото се изграждат различни конструкции на роботи. Управляват се моторите така, че роботите да извършват прецизни завои около „земята“ и „луната“. Преодоляваме различни препятствия след като се блъснем в тях благодарение на сензора за допир.
С помощта на сензора за разстояние роботът се движи без да се блъска в заобикалящите го препятствия. Достигаме до понятията цикъл, градуси, среден мотор. Накрая роботите могат да изпълняват едновременно две различни неща - докато изпълняват мисии върху специално изградено поле, третият двигател разчиства засечени обекти.
- 126
- 123:52
- 150
Занятие 3 - Разчистване на площадка за кацане
Въведение
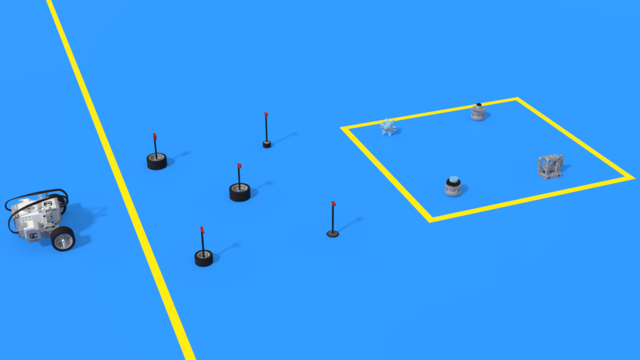
Днес ще построим робот, който разчиства автоматично площадка за кацане.
Преди да кацнете с космически кораб на Луната, изпращате робот, който да почисти площадката за кацане. Вашият робот ще бъде пренесен с ракета до Луната и задачата му е да разчисти площадка за кацането на вашия по-голям кораб.
Роботът каца малко по-далеч от площадката, която трябва да разчисти и за това трябва да навигира до нея. За съжаление пътят му е затрупан със скали, които не може да премести и трябва да ги заобиколи.
- 9
- 4
- 2
- 3d_rotation 0

Ниво Б - "Пътешествие в Космоса" - Роботика с LEGO
Второто ниво на Роботика с LEGO предназначено за ученици от втори, трети или четвърти клас.
Въвежда се нов сензор - за разстояние, който с помощта на ултразвук позволява на робот-прилеп да се движи без да се блъска в заобикалящите го препятствия. Работи се с новите понятия: цикъл, градуси, среден мотор. Роботите вече изпълняват едновременно две различни неща - докато изпълняват мисии върху специално изградено поле, третият двигател разчиства засечени обекти. Конструира се една от първите верижни машини.
- 63
- 3:02
- 117

Занятие 3 - Свободно строене
Въведение
Днес ще построим робот, който разчиства автоматично площадка за кацане.
Преди да кацнете с космически кораб на Луната, изпращате робот, който да почисти площадката за кацане. Вашият робот ще бъде пренесен с ракета до Луната и задачата му е да разчисти площадка за кацането на вашия по-голям кораб.
Роботът каца малко по-далеч от площадката, която трябва да разчисти и за това трябва да навигира до нея. За съжаление пътят му е затрупан със скали, които не може да премести и трябва да ги заобиколи.
- 3
- 3
- 2
- 3d_rotation 0

Ниво EV-ь
Първо ниво за ученици от 1-ви клас ги въвежда в света на роботиката.
Децата се запознава с нашата система за електронно обучение, с комплектите с които работим в занятията и техните възможности, и правят първите си стъпки в света на програмирането.
Разглеждат се основни принципи за конструиране и движение на роботите. Учениците ще се научат да визуализират изображения и текст върху екрана на робота, както и да възпроизвеждат звук.
- 14
- 2:49
- 102
Занятие 4 - Завои с един двигател
Въведение:
След като учениците са дошли и са отбелязани присъствията е време да започенем с четвъртото занятие. Преди всичко е хубаво да си припомним какво правихме предишният път. Чрез насочващи въпроси е хубаво преподавателят със съществена помощ от учениците да обобщи наученото в предишното занятие в рамките на 5 до 10 минути. Влезли вече в ритъм, сме готови да повторим отново упражнението с Moodle. Очакването е това отново да отнеме около 15-20 минути. Все пак с всяко изминало занятие това време трябва да намалява.
- 2
- 2
- 1
- 3d_rotation 1

Python за EV3 LEGO Mindstorms - ниво 1
Нивото въвежда работа с програмния език Python, който доби голяма популярност в последното десетилетие, както като език за въвеждане на начинаещи в програмирането, така и за програмиране на системи с изкуствен интелект, така нареченото машинно учене.
По време на нивото учениците се учат да четат и пишат Python инструкции и да работят с Интегрираната среда за разработка на приложения Visual Studio Code IDE. Роботите изпълняват забавни задачи от ежедневието ни, като "робот да ти донесе вода". Роботите използват трите си мотора и учениците се учат, какво са параметри на команда в Python и как да ги използват съобразно задачите си. Нивото завършва със състезание за точки по поле.
- 74
- 28:18
- 114

Занятие 7 - Складов робот
В случаите, когато учениците не карат модул от две нива наведнъж, днес е последното занятие от нивото.
- 6
- 3
- 8
- 3d_rotation 2

Python за EV3 LEGO Mindstorms - ниво 2
Във второто ниво по Python за EV3 роботи учениците изучават в дълбочина сензора за допир. Сензорът се разглежда както като средство за ръчно управление на машини, така и като сензор за автономни роботи. В няколко занятия учениците изграждат пулт за управление на хващача и движението на кран. От страна на програмирането учениците изучават конструкциите за разклоняване на код "if-else", условните и безкрайни цикли с "while" и операторът за обръщане на условие "not". В края на нивото роботите могат да усещат препятствия които да избягват и излизат от простичък лабиринт.
- 39
- 19:58
- 93

Занятие 6 - Aвтоматизирана прахосмукачка
Въведение
Днес ще създадете робот, който се държи като автоматизирана прахосмукачка!
Една от най-досадните домашни задължения, които има всеки отговорен възрастен човек е да почиства домa си. Затова инженерите са създали румбата! Не говорим за танцът румба, а за роботизираната домашна прахосмукачка.

- 5
- 4
- 8
- 3d_rotation 1

Ниво A - Пътешествие из космоса - Роботика с LEGO SPIKE Prime
Първото ниво от учебната програма по LEGO роботика за ученици от втори, трети и четвърти клас.
Едно, “пътешествие из космоса”, но с роботи. В нивото се изграждат различни конструкции на роботи. Управляват се моторите така, че роботите да извършват прецизни движения около „земята“, „луната“ и „слънцето”. Преодоляваме различни препятствия след като се блъснем в тях благодарение на сензора за сила. Научаваме любопитни факти за Слънчевата система и за космическите апарати.
- 65
- 30:30
- 76

Занятие 3 - Сателит
Въведение
В днешният урок ще направим малък робот, който да ни покаже как може да се движим в завой по кръг, завой по дъга. Темата на занятието са сателитите и ще си поговорим, какви са техните приложения в нашето ежедневие.

Сателит означава просто Спътник, нещо което се движи заедно с друго нещо. Естествен спътник на планетата Земя е Луната, а изкуствени спътници са малки космически апарати, които са изведени в орбита около земята с помощта на ракети и ги наричаме сателити.
Орбита е въображaемият път, по който се движи сателитът докато обикаля около земята. Днес ще програмираме роботите си да се движат в кръгови орбити, но има и орбити които приличат на яйце, елипсовидни или елиптични орбити.
- 6
- 4
- 11
- 3d_rotation 1
Level A: Python Foundations – Robotics with LEGO SPIKE Prime
This is the first level of the LEGO Robotics Curriculum with Python, designed for students in grades 2, 3, and 4.
In this robot adventure, students learn to control robots using real Python code, while teachers guide them through their first steps in text-based programming. Throughout the level, students build a variety of LEGO SPIKE Prime robot models and program them to move, turn, and complete tasks with increasing precision.
Step by step, students learn how to read, understand, and write their own Python programs. Through fun and creative challenges, they bring their robots to life and discover how code can control movement, solve problems, and interact with the world. Along the way, they explore concepts such as navigation, obstacle avoidance, and sensor-based behavior.
The curriculum is designed to help teachers introduce programming in an engaging and approachable way while giving students plenty of opportunities to experiment, test ideas, and develop confidence in their coding skills.
By the end of the level, students apply everything they have learned in an exciting robotics competition. Using their own programs and robot designs, they complete missions on a competition field with boxes, putting their coding, engineering, and problem-solving skills to the test.
- 46
- 4:32
- 78

Lesson 7 - Warehouse Robot
В случаите, когато учениците не карат модул от две нива наведнъж, днес е последното занятие от нивото.
- 4
- 3
- 11
- 3d_rotation 2