Ще разгледаме едно доста познато блокче, настроено по нов начин.

Необходимо е да се абонирате за FLLCasts.com, за да достъпите това видео
- #1073
- 08 Feb 2019
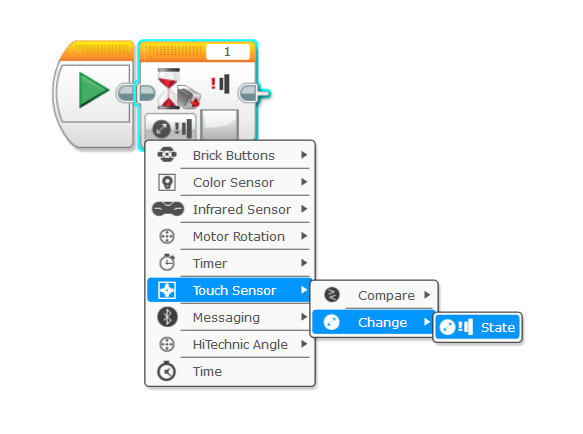
Досега сензорите ни чакаха условие - стойността на сензора да стане по-малка от дадена граница или да стане по-голяма от дадена граница. Днес ще се запознаем с друго изчакване - изчакване на промяна на измереното от сензора.
Какви могат да бъдат промените:
- Сензор за допир: Това е лесно - да се промени от натиснат на отпуснат. Ако е бил отпуснат да се промени на натиснат.
-
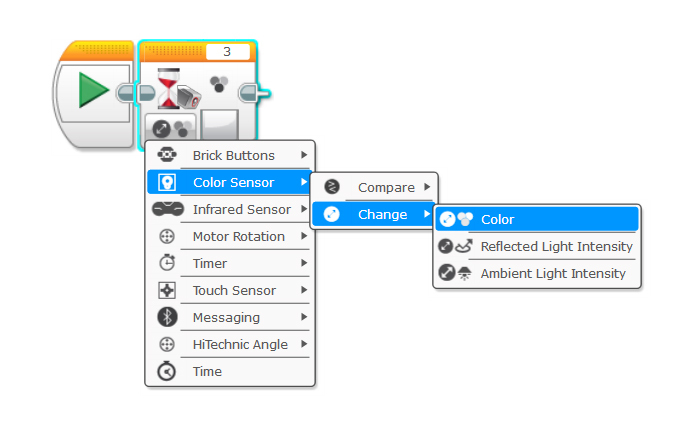
Цветен сензор: чакаме за промяна на цвета. Ако сензора засича за зелено чакаме да спре да засича зелено, тоест всеки друг цвят.
 При останалите три сензора - жироскопичен сензор, сензор за разстояние, сензор за яркост, чакаме сензора да промени стойността, която измерва в момента. Те измерват между 0 и максимална стойност.
При останалите три сензора - жироскопичен сензор, сензор за разстояние, сензор за яркост, чакаме сензора да промени стойността, която измерва в момента. Те измерват между 0 и максимална стойност.
 Какво представлява този #?
Какво представлява този #?
В диеза (може да ви е познат и като хаштаг) трябва да настроим чувствителността на нашето блокче. Реално в него трябва да зададем с колко единици трябва да се промени стойността, която получаваме от сензора, за да реагира блокчето за изчакване.
Единиците за измерване промяната на различните сензори са различни: проценти, градуси, сантиметри и други.
Курсове и занятия включващи този Урок
Този Урок е използван в следните курсове и занятия.

Роботика с LEGO - Ниво 3.0 - Сигурност и охранителни системи
Ниво 3.0 е пета част от курса по “Роботика с лего”, предназначена за роботика за ученици от пети до дванадесети клас.
В това ниво започваме да въвеждаме работа с данните, измерени от сензорите. Въвежда се понятието алгоритъм и в програмите се правят изчисления без предварително да са известни стойностите, с които се пресмята. Програмните блокчета си обменят информация с помощта на жичките за данни. Роботите разглеждат проблемите на охраната и сигурността, изграждат се различни алармени системи и се разглеждат физическите принципи на различните методи за охрана.
- 50
- 1:03
- 213

Занятие 2 - Претеглящи стойки за защита
Въведение - претеглящи плочи, засичащи промяна на теглото
В предишното занятие, сензорът на робота беше двоичен. Това означава, че имаше състояние само има обект и няма обект. Ето защо е лесно да притиснем плочата, да вземем експоната и да поставим камък на негово място. Така ще си заминем без системата да ни усети. Трябва да измислим нещо по-хитро, за да си защитим вещите.
Умен начин би бил да имаме робот-кантар, който да усеща всяка промяна в теглото. Ако теглото стане по-голямо, тоест някой е притиснал плочата, системата трябва да подаде,, аларма. Когато теглото стане по-малко, значи някой повдига експоната и системата също трябва да сигнализира за престъпник.
- 8
- 5
- 15
- 3d_rotation 1