Now we are going to focus on a well-known block but set differently.

To access the full video please subscribe to FLLCasts.com
- #1073
- 08 Feb 2019
So far we have programmed the sensors to wait for a condition to evaluate to true – either the value to become smaller or bigger than a given threshold. Today we will program them to wait for a change in the measured value.
What kind of changes can we expect:
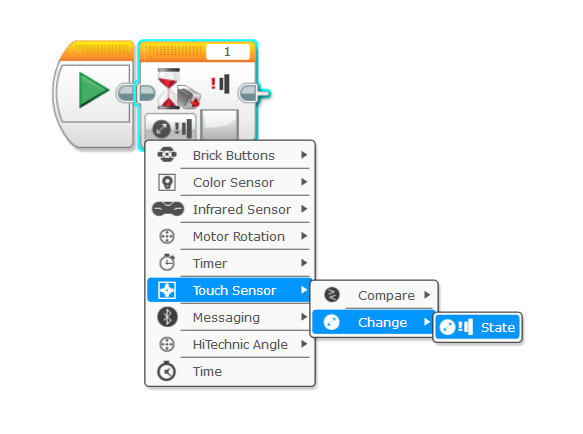
- Touch sensor: That one is easy. The block is waiting for the state of the touch sensor to change either from pressed to released or from released to pressed.
-
Color sensor: To wait for a change in color. For example, if the sensor measures green, we wait until it starts measuring any other color.
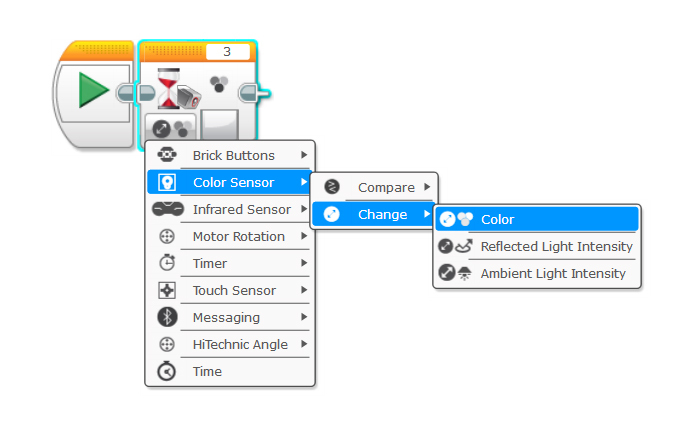
- For the gyro sensor, the ultrasonic sensor and the color sensor, we wait for the sensor to change the value it is measuring at the moment. Values range from 0 to maximum.
 What does this symbol # stand for?
What does this symbol # stand for?
We program the sensitivity of the block in the number sign, or hashtag symbol as you probably know it. We set how much units exactly the value we receive from the sensor should change in order for the wait block to react.
The units for the various sensors can be expressed in percent, degrees, centimeters, etc.
Courses and lessons with this Tutorial
This Tutorial is used in the following courses and lessons

Robotics with LEGO - Level 3.0 - Security systems
This is the fifth level of the Robotics with LEGO curriculum for students in fifth to twelfth grades.
In this level students will learn how to work with data measured by the sensors. The concept of Algorithm is introduced and the programs perform calculations without knowing the values beforehand. The programming blocks transfer data between each other via data wires. The robots are designed to address the problems of security systems. Variety of alarm systems are built and the physical principles of different security methods are considered.
- 50
- 1:03
- 213

Lesson 2 - Weighing security stand
Weighing plate, using weight change block
The sensor of the robot from the previous lesson was binary. This means there was only one state possible – either there is an object or there is no object. Therefore, it was very easy to press the plate, take the exhibit and put a stone instead. And the system could not detect us anyway. That is why now we have to think of something better in order to protect the valuable exhibits.
A clever solution is to have a robot which “senses” each change in weight. If the weight is greater, this will mean there is someone pressing the plate and the system should trigger the alarm. If the weight becomes lower, this will mean someone has stolen the exhibit and the alarm should also go off.
- 8
- 5
- 15
- 3d_rotation 1