
Accelerate and Decelerate with LEGO MINDSTORMS Robot Inventor
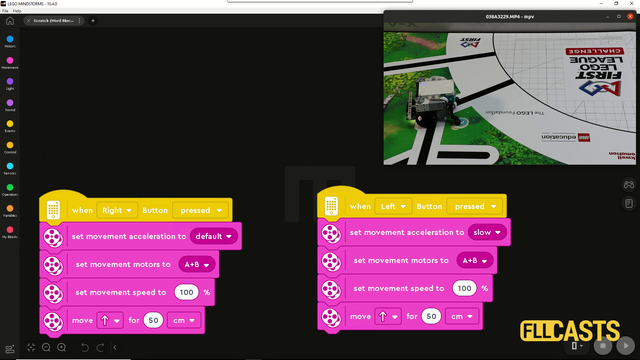
In this video tutorial we are demonstrating the impact of slow and fast acceleration on the robot. In the Scratch program there is an acceleration block for fast and slow acceleration. The robot behaves in different way. Let's explore them so that you know what to use for FIRST LEGO League competitions.
- #1959
- 31 Oct 2022

























