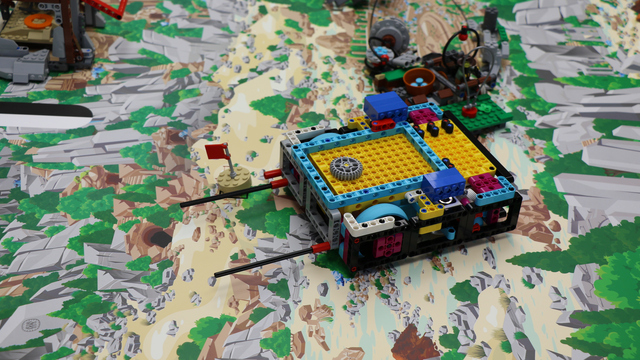
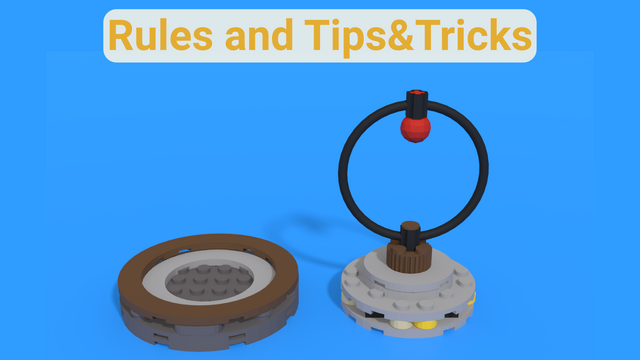
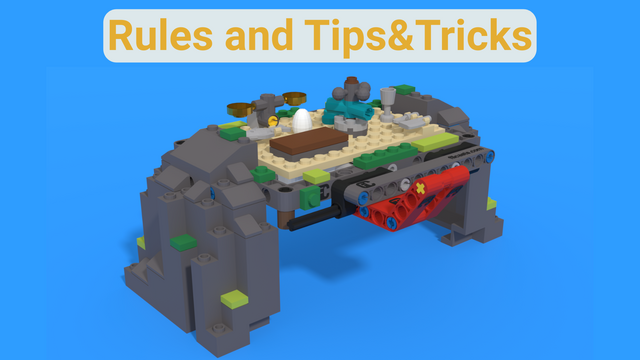
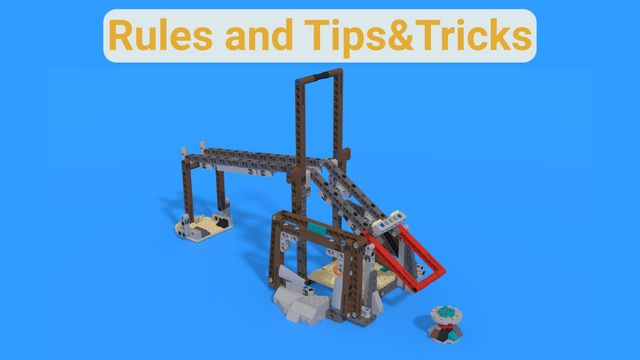
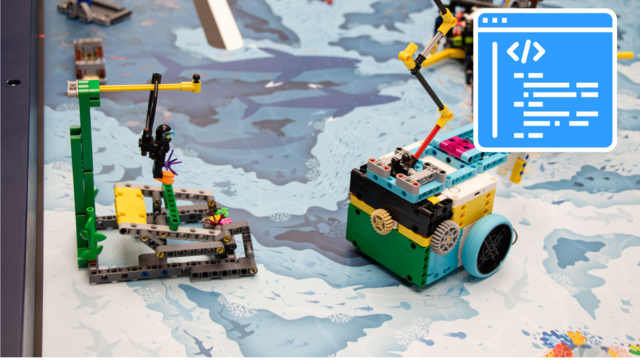
In this video tutorial, we demonstrate a full run for the FIRST LEGO League 2024-2025 SUBMERGED challenge, completing all missions in a single sequence. Each mission is shown individually beforehand, with close-up views of how the attachments work and the principles behind their design. All attachments are pinless, making them quick to change during the run, though aligning and loading the robot still requires practice. The strategy involves moving from one base to the other while accomplishing as many missions as possible, including retrying those close to base when needed.
While the complete run takes longer than the official 2.5 minutes, the focus here is on demonstrating reliability, consistency, and the trade-offs between time and scoring points. In some cases, missions are skipped to focus on higher-value tasks, but in this run, we aim to complete them all. The result is a strong performance that comes close to the maximum possible score.