Many teams are having troubles with the EV3 Gyro Sensor and its drift. In this video we are showing one way to fix this behaviour and get an accurate measurement from the sensor.
- #87
- 01 Jan 2017
- 1:55
What is the "drift"?
When you connect the sensor to the brick it shows a certain value. Then, after a moment it shows another value even though nor the sensor or the Mindstorms robot is moving. This makes it difficult to use the sensor for positioning the robot.
This problem has been reported many times and discussed in many forums.
There is a hardware and a software solution
In this video we are stopping at the hardware solution. In some of the next videos we would stop at different software solutions.
More on the gyro sensor
Check out the How to Use EV3 Gyro Sensor of the LEGO Mindstorms Robotics Set video tutorial
English
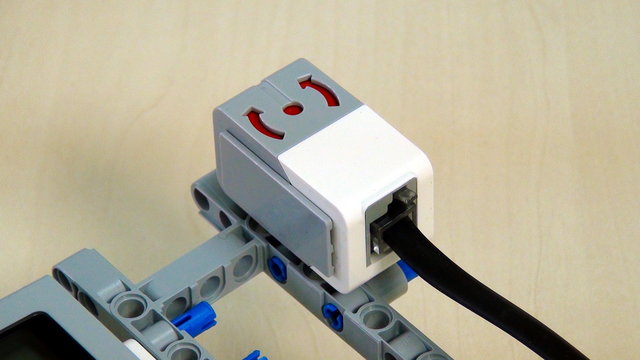
- The gyro sensor of the Mindstorms' EV3 robot has a famous problem. It's called the gyro drift. As you can see currently the value detected by the sensor is changing although we are not moving the robot. We got a request from several teams to explore different solutions of this problem. And in this video we're gonna stop at the hardware solution.
It's quite simple and when you get to this point, see the gyro drift? You just unplug the sensor. Then you make sure you don't move the robot. And then you just plug to make sure we don't move it. We plug the sensor again.
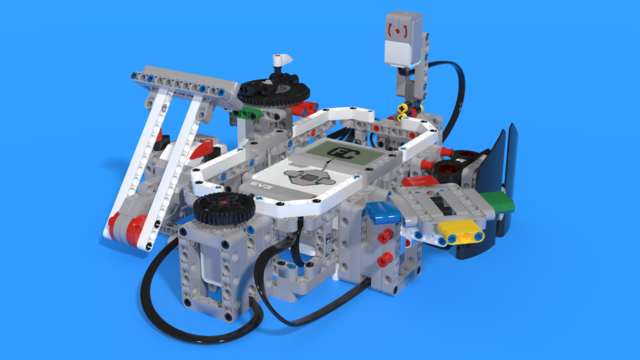
As you can see, the drift is now gone and if I move the robot, it detects the angle of rotation.
Again, if we unplug the sensor and if we plug it while moving the brick.
We get the drift. The brick is not moving, but the values are changing. So you just unplug. Wait for a while. Make sure you don't move the robot. Plug it gain.
And the drift is gone.
Courses and lessons with this Tutorial
This Tutorial is used in the following courses and lessons

Moving Straight with LEGO Mindstorms EV3 robots
One of the most controversial topics when it comes to LEGO Mindstorms robots is how to make them move in a straight line. This is a problem that has caused a lot of confusion among teachers, parents, rookie teams and students. The robot makes about 2-3 centimetres error for every meter, which is about an inch for every 3-4 feets. In this course, I would like to discuss the different ways in which you can improve the behaviour of the robot and how you could make it move in a straight line with the help of the LEGO Mindstorms EV3 Gyro Sensor.
- 24
- 102:09
- 3

Gyro Sensor Calibration
Many teams are having troubles with the EV3 Gyro Sensor and its drift. In this video we are showing one way to fix this behaviour and get an accurate measurement from the sensor.
- 2
- 0
- 0
- 3d_rotation 0

EV3 Basic Course. Introduction to robot programming, construction and sensor use
This course is designed for students, mentors and teachers that are completely new to LEGO Mindstorms EV3 robots and would like to start using them to learn, in classes or at competitions. It is quite different from previously built resources at FLLCasts because it makes no assumption on any previous knowledge and tries to introduce everything step-by-step.
- 38
- 193:26
- 30
Gyro Sensor Calibration
Many teams are having troubles with the EV3 Gyro Sensor and its drift. In this video we are showing one way to fix this behaviour and get an accurate measurement from the sensor.
- 2
- 0
- 0
- 3d_rotation 0

Robotics with LEGO - Level 2.5 - Maritime Journey
The fourth level of the Robotics with LEGO curriculum for students from fifth to twelfth grades.
In this level students focus on the rotational sensor that is part of every motor in the robotics set. Students also learn to use the fourth sensor in the robotics set - the gyro sensor.
First few robot constructions imitate sea-animals and their behavior. Students create programs that check whether the robot's claws or pecks have successfully caught an object. That sensor in the motors allows the robots to go back in their lairs even after the use of unlimited movement. The rest of the robots are modeled after boats, yachts, and ships. With the help of the gyro sensor, students can set a course for their robots to a given angle and can detect deviations from the course. In open seas, there may be sea-monsters and the robots are being programmed to detect a sudden change in acceleration with the help of the said sensor.
- 42
- 3:52
- 133

Robotics with LEGO - Level 4.0 - Kinesthetic and Memory Game (in development)
The seventh level of the Robotics with LEGO curriculum for students in sixth or seventh grade.
In this level, student develop a memory training game. The player must remember series of actions like press a button, shake a pole, pull a lever, show one of many colors. In order to program the game, students use many variables and modify their states. Students create their own custom sounds and images, in order to reflect their own personality in the game. In the end of the level, the game stores top scores even after a full shut down with the help of text files.
- 59
- 2:58
- 200
Remind yourself how to work with the gyro sensor
You've seen the gyro sensor. It has two arrow. How does it work? What does it do?
- 6
- 0
- 0
- 3d_rotation 0
Level D2. "Seafaring". Robotics with LEGO
The eighth level of the Robotics with LEGO curriculum for students in third or fourth grade.
In this level, students learn to use the fourth sensor in the robotics set - the gyro sensor. The robots are modeled after boats, yachts, and ships. With the help of the gyro sensor, students can set a course for their robots to a given angle and can detect deviations from the course. In open seas, there may be sea-monsters and the robots are being programmed to detect a sudden change in acceleration with the help of the said sensor.
- 24
- 2:49
- 107

Lesson 1 - Pedalo for fishing
Introduction
Today we would build a pedalo for fishing. Have you event been on a pedalo? Have you see pedalos? Where?

Do you know that motor boats are not allowed in lakes and dams as they disrupt the animals. That's why today we are going fishing with a Pedalo.
Finishing boats and pedalos for fishing use an device called sonar, to detect large groups of fish. Our pedalo would use exactly such device to detect the group of fish and catch up with it.
- 4
- 4
- 10
- 3d_rotation 1