VEX IQ Robot Base 4
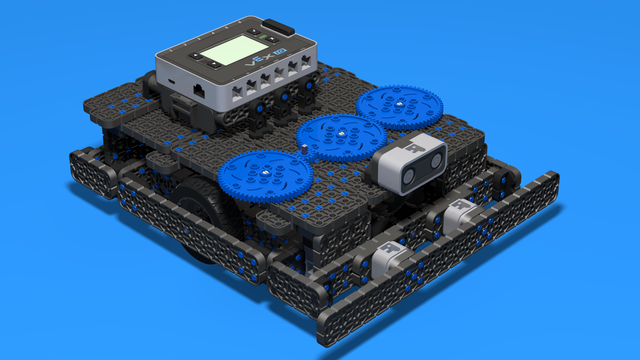
It's a VEX IQ robot base with all VEX IQ Sensors. The robot has 1 x Gyro, 1 x Ultrasonic, 1x Color Sensor, 2 x Toch Sensors, 1 x Touch Led Sensor.
- #314
- 14 Jul 2017
There are common patterns when working with LEGO Mindstorms Sensors that could be applied to Sound, Rotation, Gyro, Color and all the other sensors.
LEGO Mindstorms EV3 and NXT include many sensors. Use of the sensors is what makes the robot powerfull.
It's a VEX IQ robot base with all VEX IQ Sensors. The robot has 1 x Gyro, 1 x Ultrasonic, 1x Color Sensor, 2 x Toch Sensors, 1 x Touch Led Sensor.

It's the second version of the Robot Base 4, but with rotated inside motor.

The Gyro sensor in LEGO Mindstorms EV3 sets is new for the sets and we answer basic questions about its usage. The sensor detect when the whole constructions turns at a particular angle, but there are a number of gotchas in using it.


The Gyro sensor can be positioned horizontally, vertically or at a random angle. Have you ever wonder what does the gyro detect when it is positioned vertically. This is the subject of this video tutorial for the LEGO Mindstorms EV3 Gyro Sensor.

This is the final run for our World Robotics Olympiad (WRO) 2015 Elementary Challenge Robot. In "dives", detects the color of the pearl and then counts the number of Ping-Pong balls to release.

Tasks for the Gyro sensor that you can use in STEM classes, while preparing for a competition or just to explore how the sensor works.

Let's explain the problem of just waiting for the Gyro sensor to detect an angle and think of why the robotics systems work like that.

The EV3 Gyro sensor is quite powerful, but there are some little tricks when using it. In the previous episode we showed a hardware solution to the problem and now we are exploring how could the sensor be calibrated from the EV3-G software. Thanks to Sharon and Faye (full names omitted) for the request for this video.

This video tutorial reviews the EV3 Gyro Sensor and the HiTechnic Gyro Sensor for the LEGO Mindstorms NXT robotics Kit. We compare the two sensors and demonstrate them in action.
Many teams are having troubles with the EV3 Gyro Sensor and its drift. In this video we are showing one way to fix this behaviour and get an accurate measurement from the sensor.

Showing the same run, but from a different angle. This allows you to see more of the way we sensors work and how exactly the robot positions itself.

Turning with the Gyro Sensor on a specified angle and stopping there have never been easy. It is not going to get any better. However, this is not a problem of the Gyro sensor. The problem is in the way we develop our programs.

A chassis built with LEGO Mindstorms EV3 parts designed for World Robotics Olympiad

The first of a series of attachments that we add to a World Robotics Olympiad LEGO Mindstorms Robot. The attachment is an example for collecting ping-balls. The robot and the attachment are in the same construction. The attachment is a base for a container that could be extended.

This WRO robot is designed to collect a lot of ping pong balls in its container. It's built with LEGO Mindstorms EV3 45544 and 45560 sets. These are the LEGO Educational sets. The robot has two chains that collect the balls and push them into the container attachment. This is one of the larges robots we've uploaded at FLLCasts yet. You could learn a lot by following the building instructions and paying attention to the details of how this robot is built. All the alignment, all the connections. Really beautiful.

This is a real competition robot with three light sensors and a gyro.

One of the most controversial topics when it comes to LEGO Mindstorms robots is how to make them move in a straight line. This is a problem that has caused a lot of confusion among teachers, parents, rookie teams and students. The robot makes about 2-3 centimetres error for every meter, which is about an inch for every 3-4 feets. In this course, I would like to discuss the different ways in which you can improve the behaviour of the robot and how you could make it move in a straight line with the help of the LEGO Mindstorms EV3 Gyro Sensor.

The robot can move with different speed by applying different power to the motors. It will most of the time make smaller deviations when it moves slower. But you can't just move with a power of 10 all the time. This is a way too slow especially for competitions like FIRST LEGO League or World Robot Olympiad. In this video tutorial I would like to discuss the balance between motor power and robot movement error, how does the battery influence the power of the robot and to conduct an EV3-G experiment that will record the values of the Gyro Sensor along with the current power.

The first part of making the robot move straight is to keep it oriented straight. While it moves it could make an error and turn slightly to the right and then the program should turn in back to the left to make its orientation straight. In this video tutorial, we would discuss how to implement a program to keep the robot orientation straight even when we are pushing or pulling it to either side and in the same time it has different wheels.

We keep the robot orientation straight while moving, but when we stop the robot could be in a different orientation. This applies for both using the Mindstorms Gyro Sensor when moving straight or the Mindstorms Color sensor when following a line. In this video tutorial, we will do a few examples of when an how this could happen.

This is where the confusion really comes. We are keeping the robot orientation straight while the robot moves, but at the end the, robot is not at the fiinal location that we would like it to be. The robot is still about 2-3 centimeters away after moving for about a meter.