
Box Robot - one more active attachment
A simple active attachment that could be added to the Box Robot Chassis.
- #251
- 29 Sep 2016
A simple active attachment that could be added to the Box Robot Chassis.

Building instructions for the construction plates mission models. The models are used in the Road construction mission of FLLCasts Off-season Challenge with LEGO Mindstorms EV3.
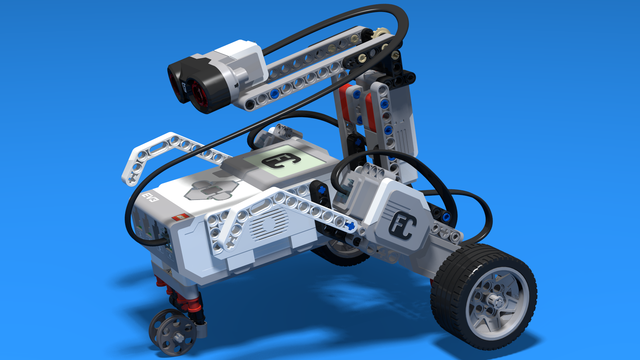
Following the Spy Bot, we have this new Spy Vehicle. Yes, yes it is using an ultrasonic sensor.
The building instructions are for a robot base that looks like a car but is not exactly a car and has a strange shape. Just like spy vehicles - a car, but not only a car and not just a car.

This is a simple pinless active attachment for the SUV Box Robot.
In this attachment we use "(32498) Technic Gear 36 Tooth Double Bevel". There are four pins added to the wheel and it it this pins that engage with the "(32072 ) Technic Gear 4 Knob". The more important thing is that the knob wheel and the gear wheel are parallel to each other.
While the motor rotates the attachment has 4 points of contact (instead of one or two when two Knob Wheels are in contact) with the robot knob wheel. There are no forces that drive the attachment to jump and lose engagement with the robot.


So far, you have used commands requiring only one input parameter, but many commands in programming require a lot more than one type of information. Such an example is the "run_time()" command.

Arriving at a final solution. There is still room for improvement on using the Mindstorms Ultrasonic Sensor for aligning to walls, but we hope the whole five videos could give you a good idea of how to start with a problem and reach a solution.
