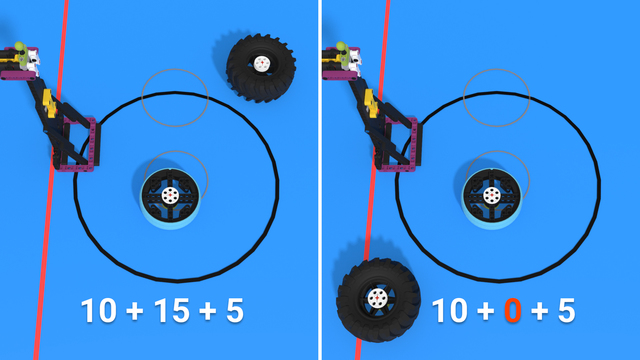
How a Grab attachment accomplishes a loops mission. Demo with Luly Box Robot from LEGO Education SPIKE Prime
Taking/Grabbing loops is one of the most common mission types at robotics competitions like FIRST LEGO League/World Robotics Olympiad. This tutorial is about an attachment that grabs the loop. The attachment uses Luly, a small LEGO Education SPIKE Prime competition robot with 3D building instructions as a robot base.
- #1706
- 21 Apr 2021