
Необходимо е да се абонирате за FLLCasts.com, за да достъпите това видео
- #1104
- 08 Feb 2019
За претеглящата плоча трябва да се обясни принципът, на които работи. Тя представлява една гума, която се спуска надолу под тежестта на даден предмет. Тази промяна във височината намаля разстоянието между плочата и сензора за цвят. Така вече се отразява различно количество светлина и се променя стойността, която засича сензорът. На практика сме си създали кантар.
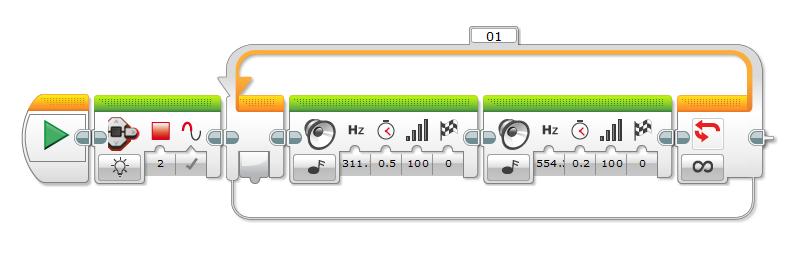
Примерно решение на задачите в секция "Създаване на наша собствена аларма":
Оставете учениците да се позабавляват с алармата в началото. Важното е да използват тон и да променят времетраенето му.
Примерно решение на задачите в секция "Задачи с блокчета за изчакване":
Трябва първо да се покаже port view и да се намери стойността, която дава сензорът.
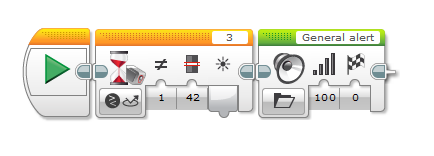
Примерно решение на задачата "Програмирайте алармата да се задейства, когато стойността не е равна на вашата. Използвайте блокче за изчакване."
Може да се разкаже и какво е калибриране. Използвайте wait compare блокче.

Примерно решение на задачата "Програмирайте претеглящата плоча да чака за промяна с големина 2 процента и да задейства алармата.":

"Позабавлявайте се! Опитайте да откраднете телефона, без да задействате алармата или да изключвате програмата."
Когато се прекъсне кабелът на сензора за цвят, програмата получава стойност 0 от него. Това е доста голяма промяна, която бива отчетена от блокчето за изчакване на промяна и се задейства алармата.
Примерни решения на задачите в секция "Програмирайте клавиш за спиране на алармата". Задачата е разписана стъпка по стъпка в малките задачи:

Курсове и занятия включващи този Урок
Този Урок е използван в следните курсове и занятия.

Роботика с LEGO - Ниво 3.0 - Сигурност и охранителни системи
Ниво 3.0 е пета част от курса по “Роботика с лего”, предназначена за роботика за ученици от пети до дванадесети клас.
В това ниво започваме да въвеждаме работа с данните, измерени от сензорите. Въвежда се понятието алгоритъм и в програмите се правят изчисления без предварително да са известни стойностите, с които се пресмята. Програмните блокчета си обменят информация с помощта на жичките за данни. Роботите разглеждат проблемите на охраната и сигурността, изграждат се различни алармени системи и се разглеждат физическите принципи на различните методи за охрана.
- 50
- 1:03
- 213

Занятие 2 - Претеглящи стойки за защита
Въведение - претеглящи плочи, засичащи промяна на теглото
В предишното занятие, сензорът на робота беше двоичен. Това означава, че имаше състояние само има обект и няма обект. Ето защо е лесно да притиснем плочата, да вземем експоната и да поставим камък на негово място. Така ще си заминем без системата да ни усети. Трябва да измислим нещо по-хитро, за да си защитим вещите.
Умен начин би бил да имаме робот-кантар, който да усеща всяка промяна в теглото. Ако теглото стане по-голямо, тоест някой е притиснал плочата, системата трябва да подаде,, аларма. Когато теглото стане по-малко, значи някой повдига експоната и системата също трябва да сигнализира за престъпник.
- 8
- 5
- 15
- 3d_rotation 1