Въведение
В това занятие правим робот скорпион. Виждали ли сте скорпиони? Къде?
Знаем, че скорпионите живеят основно в пустините. Там се хранят с всичко, което мине пред тях, използвайки тактика наречена засада. Засадата представлява тихо и скрито стоене на едно място, докато нещо не дойде достатъчно близо за изненадваща атака. Тази тактика е използвана още преди милиарди години от Тиранозавър Рекс, а днес се използва от много животински видове, дори и хората.
Но къде се крие скорпионът в пустинята?
Той използва краката си, за да си издълбае плитка дупка и след това да се зарови с пясък. По този начин се слива с околната среда.
Можете ли да забележите нашия скорпион в тази картинка?

Доста добре се е скрил и само чака някоя буболечка да мине наблизо, за да я изяде!
Конструиране и Теория
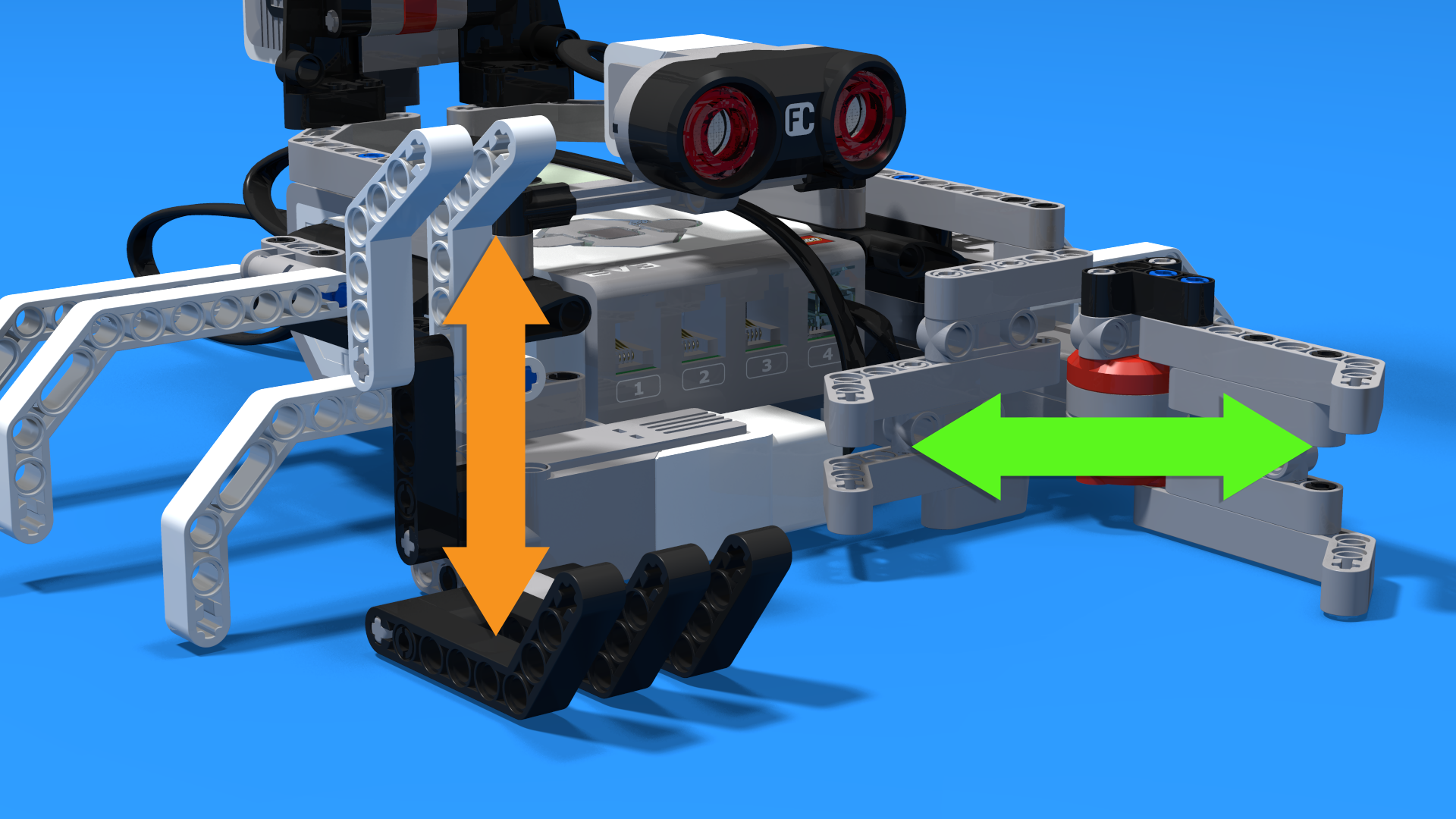
Освен че прилича на скорпион, днешният робот предава важен урок с щипките си. Забележете какви са разликите в двете щипки и помислете кога бихме използвали едната и кога другата.
Антарес - LEGO Mindstorms EV3 робот Скорпион
Антарес е най-ярката звезда в съзвездието Скорпион.
Главната роля на робота е да покаже два различни хващащи механизма в две оси. Вертикалната щипка използва среден мотор, а хоризонталната - голям мотор. Допълнително, роботът има механизъм за жилото си, който използва още един голям мотор. За глава използва EV3 сензор за разстояние, с който скорпионът може да изчака в засада и да сграбчи плячката си, когато тя се приближи!

![]()
 Сега, след като построихте робота, затворете кутията, за да не ви пречи.
Сега, след като построихте робота, затворете кутията, за да не ви пречи.
- Приберете всички части, които не ви трябват за робота, в кутията.
- Затворете кутията и я отместете, така че да не ви пречи повреме на следващите задачи.
Програмиране и теория
Задачата на скорпиона е, чрез ротационен сензор да засече дали е хванал нещо с щипките си. Ако е хванал нещо, да го убоде с жилото си.
За целта ще използваме нещо, което ще наречем очаквани градуси и едно познато блокче по нов начин.
*шепнейки* Ще настроим програмата на движение за секунди.
Браво на тези, които са прочели тук, и браво на тези, които са се сетили!
Но след като е настроена щипката да се затваря за секунди, как разбираме дали е хванала нещо? Използваме очакваните градуси!
Това означава, че винаги, когато щипката се затваря, очакваме тя да се е завъртяла на градусите, които открихме в началото. Ако не е, това означава, че има нещо в щипката и трябва да го убодем с жилото!

Блокчето, с което заменяме думата "ако" в програмата, вече ви е познато като Switch или условен оператор. Ето как се използва то за ротационния сензор:
Ротационен сензор - Условен оператор
Вече знаем как работи ротационният сензор. Сега е време да се запознаем с още начини за неговото използване.
Ротационният сензор, както всеки сензор, има собствена настройка в условното блокче.
Както можете да видите, условният оператор има само режим за сравнение (compare). Ако застанете с мишката, ще видите, че този режим има три подрежима:

- Градуси (Degrees)
 роботът сравнява с определена стойност, по подразбиране 90, количеството градуси, на които се е завъртял моторът. Блокчето проверява дали това сравнение е вярно и спрямо резултата изпълнява съответните команди.
роботът сравнява с определена стойност, по подразбиране 90, количеството градуси, на които се е завъртял моторът. Блокчето проверява дали това сравнение е вярно и спрямо резултата изпълнява съответните команди.
- Ротации (Rotations)
 роботът сравнява с определена стойност, по подразбиране 1, количеството ротации, на които се е завъртял моторът. Блокчето проверява дали това сравнение е вярно и спрямо резултата изпълнява съответните команди.
роботът сравнява с определена стойност, по подразбиране 1, количеството ротации, на които се е завъртял моторът. Блокчето проверява дали това сравнение е вярно и спрямо резултата изпълнява съответните команди.
-
Текуща Мощност (Current Power)
 роботът сравнява с определена стойност, по подразбиране 50, текущата мощност, с която се върти моторът. Блокчето проверява дали това сравнение е вярно и спрямо резултата изпълнява съответните команди.
роботът сравнява с определена стойност, по подразбиране 50, текущата мощност, с която се върти моторът. Блокчето проверява дали това сравнение е вярно и спрямо резултата изпълнява съответните команди.
За разлика от другите сензори, ротационният сензор не се включва в портовете от 1 до 4. Тъй като сензорът е вътре в моторите, портовете, на които се свързва, са от A до D, по подразбиране е порт A. Винаги проверявайте дали в блокчето е отбелязан правилният порт.

 Задачи по приключване на урока.
Задачи по приключване на урока.
- Направете снимки и клипове на роботите
- Разглобете и подредете робота
- Подредете работното си място
- Важно е да подредите електрониката на роботите върху капака на кутията.
- Навийте кабела за програмиране, така че да е събран.
- Поставете кабелите за робота до електрониката.
- Навийте кабела на мишката около мишката.
- Навийте кабела на зарядното на лаптопа така, както преподавателят ви ще ви покаже.
- Когато изключите компютъра, оставете го до кутията по роботика.
- Изключете всички програми на компютъра
- Излезте от FLLCasts
- Изключете компютъра
- Приберете столовете си под масата