LEGO Education SPIKE Prime


FLL 2019: Attachment To Accomplish The City Shaper Elevated Place (01) Robot Game Mission
This is the attachment to accomplish Fll 2019 M01 mission with the Whakatae. You can see how to attach the attachment to the robot in this tutorial.
- #1137
- 28 Sep 2020

Reusable geared attachment 1 from LEGO Education SPIKE Prime, with building instructions
This is the first type of an active geared attachment. "Active" means that is is power by a motor. "Geared" means that it use gears. "Reusable" means that you can easily extend the attachment with additional parts - eg - you can reuse it. It shows a basic principle of how power is transferred between different axles that have different orientation in space- like when one of the axles is horizontal and the other is vertical. It's built with LEGO Education SPIKE Prime parts and could be used in competitions in robotics like FIRST LEGO League/World Robotics Olympiad and others. It's designed for Luly, small LEGO Education SPIKE Prime competition robot with 3D building instructions. Check the courses in which this attachment is used for more information and tutorials on how to use it.
- #1261
- 17 Mar 2021

FLL 2020: Attachment for Tire Flip mission
This is a LEGO Education SPIKE Prime robot attachment for accomplishing the FIRST LEGO League 2020 Replay Tire Flip mission . The attachment is designed for Gazon, LEGO Education SPIKE Prime competition robot.
- #1320
- 26 Jun 2021

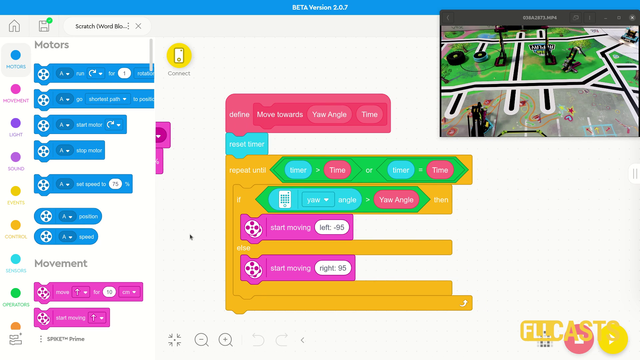

How to accurately reach a mission model with basic use of Motion Sensor from LEGO Education SPIKE Prime
In this video tutorial we use the LEGO Education SPIKE Prime Motion Sensor to reach a mission model on the field. It's a basic use of the motion sensor that we will extend in the next few tutorials and in the same time we take the opportunity to demonstrate what a MyBlock is and how to develop one. As a result of this video you will learn how to make the program easier to read and maintain by organizing the blocks in the program in special MyBlocks that couple them all together.
- #1929
- 28 Jun 2022

FLL 2021: Deliver large objects - 10 out of 10 on how to accomplish the Large Delivery mission
This is a 10 out of 10 tutorial on an active, auto-correcting, locking, and aligning attachment that accomplishes the FIRST LEGO League 2021-2022 Cargo Connect Large Delivery mission. The difference, as compared to the previous solution to the mission, is that we now use a much more consistent and reliable robot.
- #2120
- 04 Apr 2023

FLL 2023: Collect, Lever, Deliver- Chain Monster box robot accomplishing M05, M14, M15
In this video tutorial, the Chain Monster box robot accomplishes three missions in a single run from the FIRST LEGO League 2023-2024 MASTERPIECE Challenge season. The LEGO Education SPIKE Prime robot uses an active attachment to collect the mini figures, to push a lever, and to deliver the figures to their designated places. The robot starts from the red base and returns to the blue base, performing all these actions in less than 20 seconds - consistently and reliably.
- #2352
- 17 Sep 2024

FLL 2023: Push, Align - MiniBox Box Robot accomplishing M01
In this video tutorial, the MiniBox robot accomplishes M01 3D Cinema of the FIRST LEGO League 2023-2024 MASTERPIECE Challenge robotics competition. The mission model is located close to the base, and the robot uses a detachable attachment to push and activate it.
The MiniBox is a LEGO Education SPIKE Prime box robot, designed to use detachable attachments, which helps make the runs faster. Let’s take a look!
- #2334
- 25 Sep 2024