FLL 2019: Accomplish every time. M07 Swing. 10 out of 10 successful runs
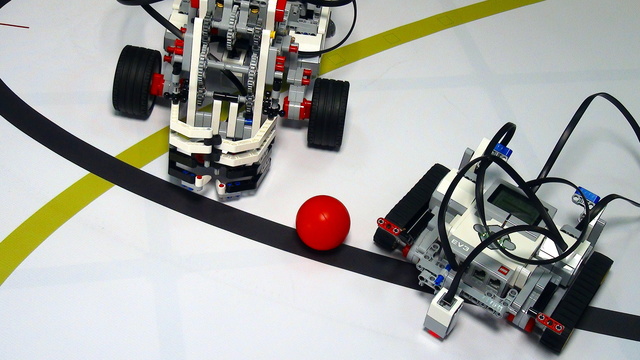
This video is part of a series where we show you how our Box Robot accomplished the M07 Swing mission 10 times. This mission has a black and white line parallel right next to it, the only thing you need to figure out is how to avoid the first supporting beam of the swing. The Dominator robot waits to be clear of the beam and then uses the x-y movement of its front mottors to position the lever so it pushes the swing loose. After that the robot moves back and is ready for action again.
- #1641
- 07 Aug 2020