

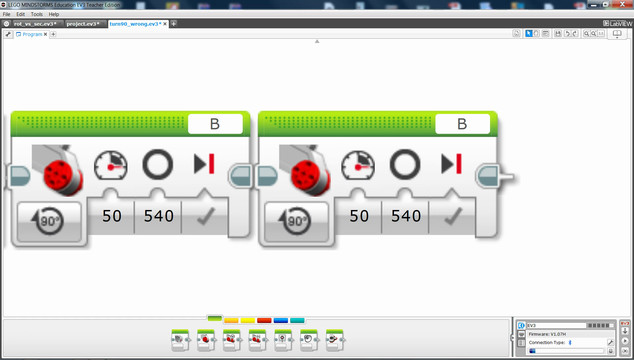
EV3 basics course. Ultrasonic Sensor. Stop & Move (part3)
Stop on detecting an object with the Ultrasonic sensor and move after detecting there is no object. Join of the previous two video tutorials in one
- #144
- 14 Oct 2015
Stop on detecting an object with the Ultrasonic sensor and move after detecting there is no object. Join of the previous two video tutorials in one
The FIRST LEGO League competition is similar each year. With a little experience you could accomplish most of mission. The goal of this episode is to introduce you to the course, its purpose and approach.

There are many loops in the FIRST LEGO League competition. In this video we collect some of them by following the idea of the ELM team.

Many FLL competitions have a mission for demolition. You should always destroy something, but destroy it in a regulated manner and probably collect the destroyed mission model after that.

Using a number of axles, beams and rubber bands we collect many loops at once. This is an important part of every competition, mostly of the FIRST LEGO League.

We keep the robot orientation straight while moving, but when we stop the robot could be in a different orientation. This applies for both using the Mindstorms Gyro Sensor when moving straight or the Mindstorms Color sensor when following a line. In this video tutorial, we will do a few examples of when an how this could happen.

This tutorial is about how to follow a wall with an ultrasonic sensor. The example is with a border from a FIRST LEGO League (FLL) competition, but could also easily be applied to other competitions and problems.

This is the final run for our World Robotics Olympiad (WRO) 2015 Elementary Challenge Robot. In "dives", detects the color of the pearl and then counts the number of Ping-Pong balls to release.

We've detected the gap. It's time to move over it. This is difficult because we have to detect where the line is after the 0.1 meters gap on the line following field.

You can collect the car for scrap or repair it. The ELM teams decide to repair it. This requires them to place the engine in the car and it's very interesting to think about this problem.

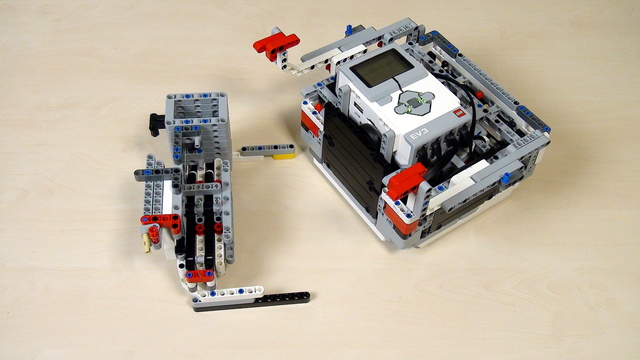
Mantissa, a LEGO Mindstorms Robot, moves and attacks. It uses the ultrasonic sensor and it's two special hands. Follow the building instructions and download the prepared program to directly use the robot.

We create a program for detecting when the Touch Sensor was Pressed/Released. Move until it is pressed, continue when it is released.

The way sensors and programs work in a robotics system is sometimes not-intuitive for a beginner, but nevertheless very logical. Building a program for a touch sensors for "Press->Go->Press->Stop" using the EV3-G software could be quite challenging at the beginning even for experienced teachers, students and robot builders.

Specific challenge on programming the robot to move as a Yo-Yo

In the first LEGO tutorial we started following a wall with the Ultrasonic Sensor. In this tutorial we would improve the program, remove the zig zag movement and make it very smooth.

Based on your feedback we have decided to show you the live process of building a complex LEGO Mindstorms Competition robot without having the whole robot ready yet. We would be making mistakes, showing them and taking up the challenges right in front of your eyes. The first construction would not be perfect but we would eventually arive at it.

"What is the light in the room?" - should it even matter. You can use one program for all lighting conditions by calibrating the color/light sensor of the LEGO Mindstorms EV3/NXT robots.

Tasks for school STEM classes or home exersie. Try to solve them to submit your solutions below.

One attachment to rule them all...We have seen it and it works -> solving most of the competition models with only one attachment. In this video tutorial without programming we would walk you through the principles and methods of using a single attachment for most of the FIRST LEGO League competition models. One can learn alot from using as few parts as possible to solve as many missions as possible.

Experiment with moving the robot in different geometrical figures. The tasks could be used in STEM classes for introducing students to geometry and math.

In this tutorial of the series we would get into more details on how the flywheel works, what's its purpose and how the whole attachment is triggered with the first rubber band.
How to search for an unknown value with the fewest possible tries.

"The devil is in the details". We are improving the Rubber band attachment with a Flywheel by introducing a few small, but important modifications that make the whole robot attachment more stable and reliable. With the conclusion of the series this attachment could be used as a basis for some very interesting STEM demonstrations on energy accumulation and conservation.
The next step of lifting a robot to a mission model is to try to use a rack.

Move the robot using the Move Steering block. We explore what the different values for Steering mean and how to use them. We also explore how the motor is configured to run for a number of rotations or seconds and what is the difference.

Next important state is Turn Right with our robot. This happens when we detect a line on the right.
