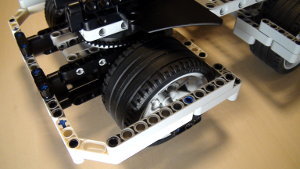
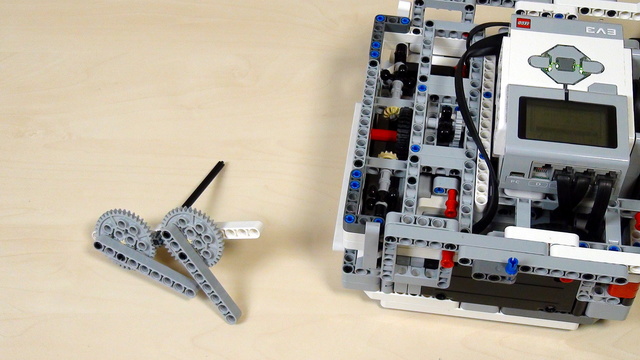
Constructing BigDaddy Competition Robot (Part 2 - Front)
Based on your feedback we have decided to show you the live process of building a complex LEGO Mindstorms Competition robot without having the whole robot ready yet. We are continuing from part 1 where we finished part of the 'front' of the robot and we arrived at a construction that we didn`t like and would fix in this video lesson.
- #71
- 15 Feb 2015