Susan comes from Sue, which is the name of the largest fully preserved specimen of T-Rexes.
Mark comes from Marc Bolan, who is the lead singer/gutarist of the band T-Rex.
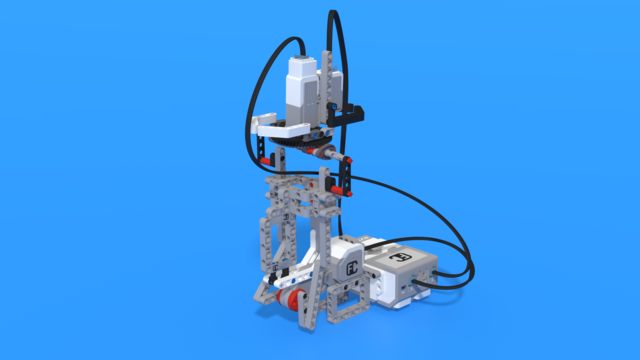
The robot is made to resemble a T-Rex (Susan) chasing a car (Mark).
The T-Rex uses a Large motor to go forward and backward. The other Large motor is used for the car, which resembles a very simple 4-wheel vechicle. Susan's task is to spot Mark using the current power option of the motor rotation sensor. As T-Rexes can not notice you if you are moving very slow, Mark is trying his best to move really slow so that he doesn't get spotted!