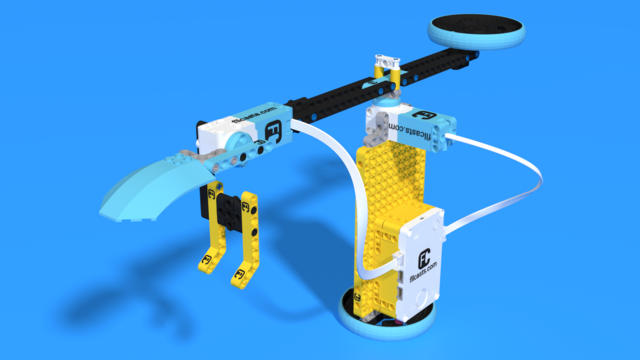
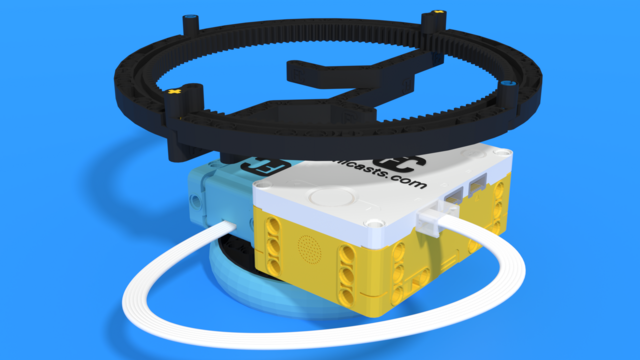
Grus - LEGO SPIKE Prime crane robot
Grus, from Latin, means Crane.
The Crane uses one motor to turn the hand and one motor to hold the ball. You need to balance the jib first? What can you add to it?
- #4178
- 25 Jan 2026
Grus, from Latin, means Crane.
The Crane uses one motor to turn the hand and one motor to hold the ball. You need to balance the jib first? What can you add to it?

Building instructions for a competition robot following the "Box robot" principle. The robot is built with LEGO Mindstorms EV3 and could be used at FLL and WRO.

The first part of a box robot chassis for robotics competitions. The robot is quite large and this is why we split it into two parts - to make it easier to construct it. This is the second part.
The robot is built with LEGO Mindstorms EV3, with an additional part for the walls used in the second part.

Building instructions for a LEGO Mindstorms EV3 Robot that we call the Five Minute Bot because it could be built in Five Minutes.
Note: If the robot is making inconsistent turns due to the floor, modify the castor wheel so it is placed further back in the construction. Thus the center of mass falls more over the tires and the turns are more consistent.

This is a real competition robot with three light sensors and a gyro.

Building instructions for a Full LEGO Mindstorms EV3 Competition Robot that could be used in LEGO Robotics competitions.
Mello is named after the famous DJ "Marshmello".
This robot is designed to work like half of a DJ set. It speeds up or slows down a melody based on the rotation of the motor. Can you create some cool remixes with it?

Paga is named after the famous violinist Niccolò Paganini.
The robot is designed to resemble a violin. The faster the motor turns, the higher the pitch it produces. Let’s see if you can play a concerto on it!

The "five minute bot with handle" gives an easy and intuitive place for children to hold it. It provides a stronger construction and cables are not included, so that adult assistance with the cables at the end of the building process is required.

Sympho is named after Symphonium, the first company to manufacture music boxes.
The robot uses a color sensor to detect whether the box is closed. When you open it, the robot can play music and spin something with the motor. You can build anything you like on top!

The instructions for building the improved EV3 Competition Robot by Mic Lowne
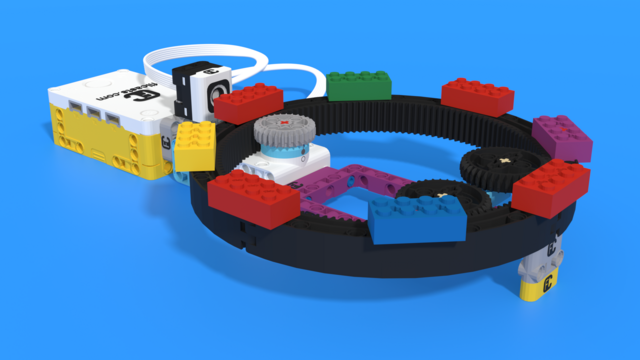
Chromagraph is a play on the original name of the record player, the "Phonograph," which comes from the Greek phono (sound), graph (writing), and chroma (color).
This robot is designed to work similarly to a record player. It has a rotating “disc” with different colored bricks that are read by the color sensor. The robot then plays a sound for each color. Can you create a melody?

"How do you build a forklift using only gear wheels and levers without a rake"... Ok, we would admit that is a difficult question. It even sounds difficult. So let's start with something easy. A LEGO Mindstorms EV3 robot. It lifts objects in the air. It uses two gear wheels that work together and then move in different directions and are placed perpendicular to each other... This sentence kind of got difficult again... Let me try again.
Follow the building instructions with these 70+ steps and you will have a very nice robot and you will learn a simple trick of how to use gears and change the directions in which they rotate.
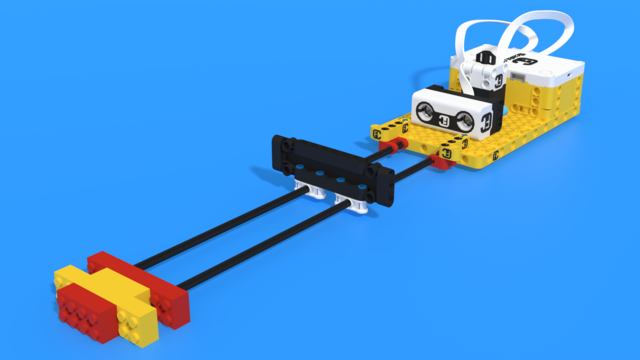
Carlos, named after the famous Mexican guitarist Carlos Humberto Santana Barragán.
The robot uses the distance sensor to determine the pitch of the sound and the force sensor to play the sound. You can shred pretty good with this one!

This incredibly compact SPIKE Prime Box Robot is made for competitions like FIRST LEGO League (FLL) and World Robotics Olympiad (WRO). Whakatae (from Maori's word "whakataetae", which means "competitive") is long 17 LEGO units and is with a width of 15 LEGO units. In front of the wheels it has two color sensors which it uses to align. Whakatae also has two Large motors for moving and has two medium motors for attachments!
It's has "V2" in its name, because it's the second version of Whakatae - LEGO Education SPIKE Prime Competition Box robot. The difference between the two is that the first one can be built with only a Large Motor and a Color sensor in addition to the Base set, while this one needs an additional ball bearing. This provides this robot with a lot more stability and can be seen as a true upgrade to the first version.

This is a program we created for the LED strip display course.
#include <Adafruit_NeoPixel.h> #define LED_COUNT 20 #define StripPin A2 #define HallEffectSensorPin 6 #define HallEffectGNDPin 5 #define HallEffectVCCPin 4 int startSeconds = 20; int startMinutes = 10; int startHours = 1; int secondsArrow; int minutesArrow; int hoursArrow; int arrowPosition; int hallSensorPastState = LOW; int hallSensorRead; int timeForOneRotation = 1; unsigned long RPMTimer = millis(); Adafruit_NeoPixel leds = Adafruit_NeoPixel(LED_COUNT, StripPin, NEO_GRB + NEO_KHZ800); int color[3] = {255, 100, 150}; int secondsColor[3] = {255, 0, 0}; int minutesColor[3] = {0, 255, 0}; int hoursColor[3] = {0, 0, 255}; void setup(){ pinMode(HallEffectSensorPin, INPUT); pinMode(HallEffectGNDPin, OUTPUT); pinMode(HallEffectVCCPin, OUTPUT); digitalWrite(5, LOW); digitalWrite(HallEffectVCCPin, HIGH); leds.begin(); leds.setPixelColor(19, color[0], Color[1], color[2]); } void loop(){ RPMUpdate(); ClearLedsWithoutTheLastOne(); arrowPosition = StateFrom60(); secondsArrow = ((int) floor(( millis() / 1000) + startSeconds) % 60); minutesArrow = ((int) floor(( millis() / 60000) + startMinutes) % 60); hoursArrow = ((int) floor(( millis() / 3600000) + startHours) % 12) * 5; if (arrowPosition == secondsArrow){ for (int i = 0; i < LED_COUNT - 3; i ++){ leds.setPixelColor(i, secondsColor[0], secondsColor[1], secondsColor[2]); } } if (arrowPosition == minutesArrow){ for (int i = 0; i < LED_COUNT - 6; i ++){ leds.setPixelColor(i, minutesColor[0], minutesColor[1], minutesColor[2]); } } if (arrowPosition == hoursArrow){ for (int i = 0; i < LED_COUNT - 10; i ++){ leds.setPixelColor(i, hoursColor[0], hoursColor[1], hoursColor[2]); } } if (arrowPosition % 5 == 0){ leds.setPixelColor(18, color[0], color[1], color[2]); leds.setPixelColor(17, color[0], color[1], color[2]); } leds.show(); } void RPMUpdate(){ hallSensorRead = digitalRead(HallEffectSensorPin); if(hallSensorRead != hallSensorPastState){ if(hallSensorRead == HIGH){ timeForOneRotation = millis() - RPMTimer; RPMTimer = millis(); hallSensorPastState = HIGH; } else{ hallSensorPastState = LOW; } } } void ClearLedsWithoutTheLastOne(){ for(int i = 0; i < LED_COUNT - 1; i ++){leds.setPixelColor(i, 0);} } int StateFrom60(){ return (int)floor(((millis() - RPMTimer) * 60) / timeForOneRotation) % 60; }