
Mack - Truck built from LEGO Mindstorms EV3
Instructions for building a LEGO truck. We use a medium motor for steering and a large motor for driving one of the rear wheels.
- #860
- 17 Aug 2019
Instructions for building a LEGO truck. We use a medium motor for steering and a large motor for driving one of the rear wheels.

Francesco 2 is inspired by the robot Francesco.
Building instructions for a simple car using an EV3 Large motor for turning the front wheels and EV3 medium motor with differential for driving the rear wheels. Differently, from Francesco, Francesco 2 has space where a locking mechanism is meant to be built for the differential.

Building instructions for a Light LEGO Mindstorms EV3 Competition Robot that could be used in LEGO Robotics competitions. Compared with previous versions of this robot, this one has a Gyro Sensor.

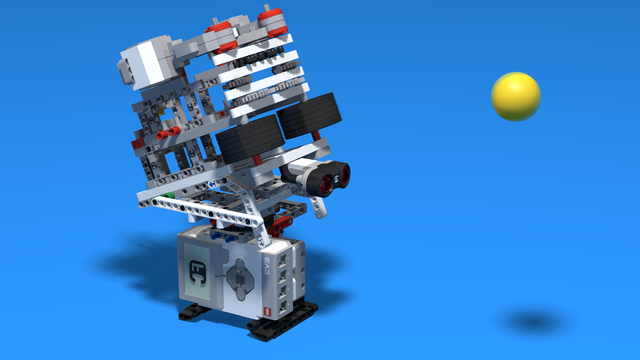
Iknathir from armenian means aircraft carrier.
The robot is made to resemble an aircraft carrier. It shoots paper airplanes using two fast spinning wheels. The wheels are connected to a gear up mechanisms which are connected to two Large motors. The motors themselves are connected to a medium motor, which allows them to move towards and outwards the plane so when they reach it, they are spinning at full speed. The plane is placed on a runway which leads it to launch successfully. On the side of the robot, there is a lever with a gyro sensor, which is used to trigger the launching mechanism.
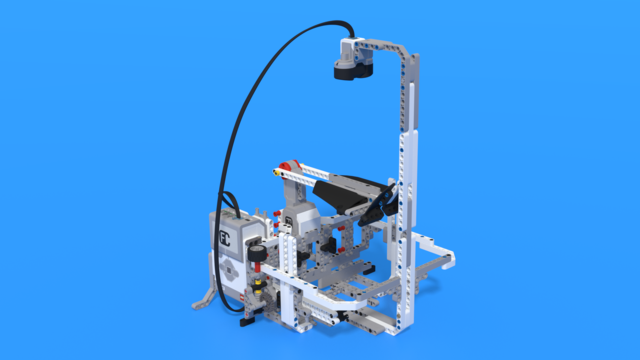
Uylam is a robot that simulates a stormy environment for its ship. It is made using two piston-like mechanisms powered by a Large motor and offset by 90 degrees to create shaking similar to that of big waves. The ship itself is made out of a medium motor on a turntable and a gyro sensor attached to them. The purpose of this is to explore what is the best position of a ship compared to the waves, so that it sustains the least amount of shaking.

Rollbar is a handy device, which only purpose is to measure lengths. Its main purpose is to measure curved lines.
It's designed for right-handed people, but with some small adjustments, it could fit any palm.
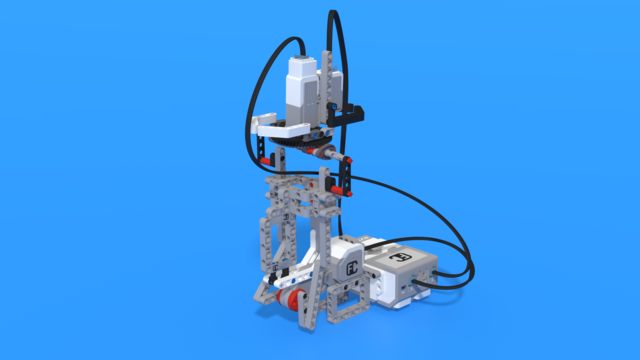
The Laboratory is a robot that tests your programming skills. You will have to measure the volume of a balloon, only by the values you receive from the sensors.
It has a valve, that allows you to deflate your balloon at different rates.
How to place the balloon in the robot is explained in this tutorial.

Gen comes from Gendema, a bulgarian late 80s rock band, popular with its song about pedalos.
The robot uses two EV3 Large motors to move, but instead of wheels it uses four-legged paddles, attached to the motors. This makes it look like a pedalo. Additionally it slides on the ground much like a real pedalo on the water.
Because of the strange mechanism of movement, the robot has a gyro sensor to help it keep a straight line.

Barco from spanish means boat.
The robot is made to look like a sail ship. The sails are made out of technic panels, attached in various ways to create the best look. Otherwise the robot uses two motors with tyres to move. At the back of the robot there is a Gyro sensor, which helps it maneuver.

Hrutur, from Icelandic, means Ram.
The robot is made to resemble a Ram. Its main focus are the gears, which make it go faster so that it can ram harder. It uses two Large EV3 motors to power the gear systems. At the front it has an Ultrasonic sensor for aesthetic purposes, which you can use however you like.
Mintonet (engl. Mintonette) comes from the name of the first iteration of volleyball.
The robot can move only forward and backward, without turning, with the help of a large EV3 motor. Another large motor is used to shoot. The robot uses an EV3 ultrasonic sensor to detect its partner and throw a ball at it.

Mintonette comes from the first iteration of Volleyball with the same name.
The robot uses two EV3 Touch sensors to control the turret left and right. It uses the EV3 Color sensor to trigger the shooting mechanism, which consists of an EV3 Large motor which pulls a lever to shoot a ball.

This robot is a simplified spinoff of the Box Robots (Box Robot 1 and Box Robot 2). It may be build with a single set, but it will require extra technic beams 7x5 with open centers.
The name of the robot - "Squmo" is derived from the ancient tradition of connecting two words to make on and hense - "Square sumo" because "Squmo".

This one is also fast. It has assistant wheels, but only to keep the balance. It is built with LEGO Mindstorms EV3 sets with the use of one additional Medium Motor.
Join the course A robot a "day" keeps the questions awake where we will further discuss the motors, how to build them and what tasks to accomplish with them.

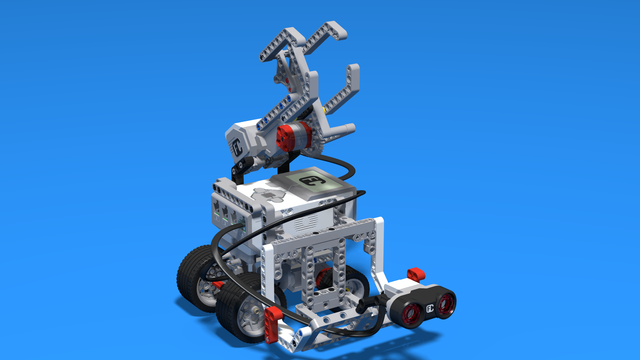
The goal of these building instructions is to build a simple LEGO Mindstorms EV3 robot without wheels. You should then think of yourself how exactly to add the wheel. Which wheels would you use on the front? How are you going to build the third wheel? Here are for example a few recommendations on building the third wheel - 1, 2, 3, 4
Later on you can expland this construction with a grabber as demosntrated here.
Building instructions for a LEGO robot that shoots 40 mm ping pong balls. The shooting mechanism is powered by two EV3 Large motors, while the whole mechanism is rotated by a medium motor. The robot can store up to 6 ping pong balls and has a Ultrasonic Sensor to detect targets.

Building instructions for the LEGO Mindstorms EV3 Catapult. The robot has a motor, a clutch to control it for manual shooting and a touch sensor for automatic loading. The bottom base is removed which means the Catapult could not be turned around. Nevertheless, the baseless robot is small enough to be built in class.

Here is another great example of a large multi-purpose attachment used in FIRST LEGO League competitions. This one is specifically for the 2017-2018 Hydrodynamics competitions and is doing a number of missions. (01) Pipe removal, (06) Water Treatment and (08) Manhole cover.
The attachment consists of two parts. The first part is placed on the robot while the second part is in front of the robot and the robot pushes it. While working on the field the robot leaves the second part on the Water Treatment plant and when returning back collects it back and returns to base.
The goal of the attachment is for you to build it and experiment with it with the existing field. Use Box Robot 2 as a robot base on which to add the attachments.

Probably the largest multi-purpose FLL attachment at FLLCasts. These attached is doing a number of missions at once. 4 of them. You attach it to the robot and start the program. The robot moves and accomplishes a number of missions using only this attachment. At it also has a lot of parts. It is quite large and you can not build it from a single set. But that's ok because you are preparing for a competition, right?
