Scrooge McRobot - LEGO Mindstorms EV3 coin counting robot
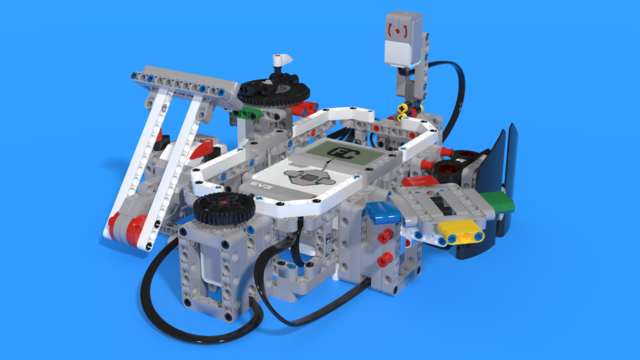
This robot was made to count coins. The door slides, making the gyro sensor rotate, and by doing that, allowing the robot to measure the size of the coin that enters the safe. By changing the points where the gyro's beam connects, the sensor's thresholds change.
- #783
- 17 May 2019