10 runs on improve accuracy by accelerating with LEGO Education SPIKE Prime
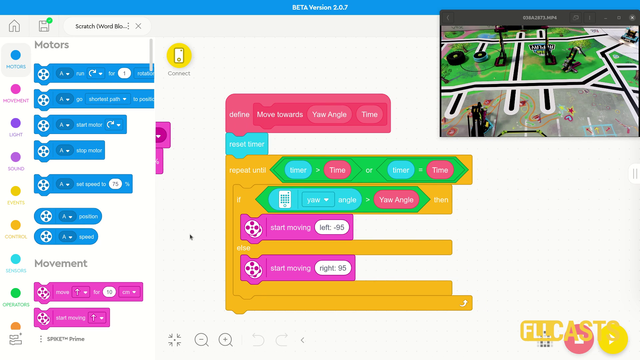
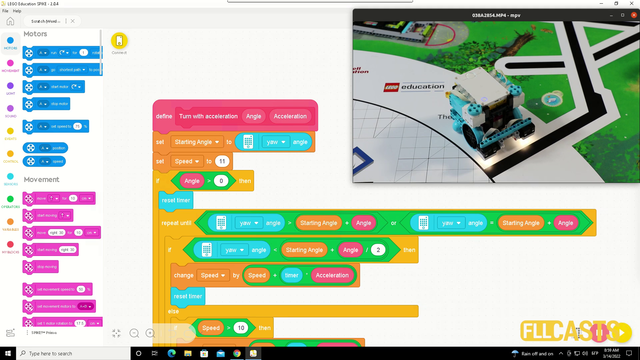
In this 10 out of 10 tutorial we demonstrate the accuracy of the robot when we use acceleration in its movements. The robot has not sensors attached to it and it is not making use of it's internal sensors. The goal of the tutorial is to give you the understanding and to make a demonstration of how difficult it is to consistently reach a mission model without the use of sensor even when we use acceleration.
- #1913
- 19 Jul 2022