Зъбните колела могат да бъдат силен инструмент в ръцета на този, който знае как да ги използва. В този материал ще се запознаем с основни определения и понятия , свързани със зъбните колела.
- #54
- 26 Sep 2014
- 5:17
Всеки механизъм има своите уникални нужди, в зависимост от целта, с която сме го построили. В някои случай се нуждаем от повече скорост, докато в други - от повече сила. Понякога ни трябва въртеливо движение, а друг път - постъпателно. За да постигнем всичко това, можем да използваме системи от зъбни колела. Днес ще разгледаме и обясним някои основни понятия, свързани със зъбните колела.
Скорост
Първо, нека разгледаме понятието "скорост" и обясним разликата между линейна скорост и скорост на въртене:
- линейна скорост наричаме разстоянието, което изминаваме за дадено време, като я измерваме в км/ч, м/с и т.н. С нея показваме какво разстояние ще изминем за дадено време. Например, ако кола се движи с 50 км/ч, то тя ще измине 100 км за два часа;
- скорост на въртене наричаме броя ротации, които правим за дадено време. Обикновено я измерваме в обороти в минута (RPM на английски). Например, големият мотор прави 150RPM, когато е на 100%. Ако го оставим да работи 2 минути, той ще направи 300 ротации или, по-просто казано, ще се завърти 300 пъти.
Сила (въртящ момент)
След като се запознахме с това какво е скорост, е време да се запознаем и със следващото понятие, а именно сила. Често, когато говорим за въртеливо движение, тоест когато нещо се върти, ще споменаваме понятието въртящ момент. Това всъщност е силата, с която моторът, или обектът, се върти. Иначе казано, това е силата, която трябва да приложите, за да го спрете да се върти. Колкото по-голям е въртящият момент на един мотор, толкова повече сила ще ви трябва, за да го накарате да спре да се върти.
Например, ако искаме роботът да може да се качва по повърхности с голям наклон или да тегли голям товар, ще ни трябва повече сила. Ако пък искаме роботът да се състезава, ще ни трябва повече скорост.
Механична енергия
Последният термин, с който ще се запознаем, е механичната енергия. За нашите цели можем да считаме следното:
Механична енергия = скорост на въртене X въртящ момент
Когато задаваме мощността на моторите от блокчето за движение, ние всъщност регулираме механичната енергия. Това означава, че когато увеличаваме тази стойност, ние не само увеличаваме скоростта, с която се въртят моторите, но увеличаваме и силата, с която те се въртят.
Зъбна предавка
След като се запознахме с основните физични понятия около зъбните колела, е време да видим как стоят нещата на практика. Зъбна предавка ще наричаме групата зъбни колела, които се зацепват, и съответно се задвижват едно от друго. Зъбното колело, което се върти от мотора, ще наричаме входно, а това, което задвижва колелата, веригите или механизма - изходно.
Всяко зъбно колело е съставено от множество зъби по края си. Оттам идва и името му. Когато поставим две зъбни колела едно до друго, тези зъбци се зацепват. В резултат, когато въртим едното зъбно колело, и другото се върти. По-интересното е, че всеки път, когато зъб от първото колело премине през допирната точна, от там преминава и зъб от второто зъбно колело.
За да видите всичко това на практика, конструирайте зъбната предавка от материала към това видео.
English
Each mechanism you build has its unique needs based on its aim. In some cases you need more speed, in others you need more torque or power. In some cases you need a linear motion and in others it should be rotational. To achieve this you need to build gear systems to modify the motion from the motors so that it will fit your needs. Stay with me for the next few minutes when I'll cover some of the basics of gear systems.
First of all, let's get familiar with some of the terms we'll be using from now on. Speed is a key characteristic of the gear systems. Usually, the term speed means distance an object travels for a certain amount of time. This actually is linear speed. The term rotational speed will be more important to us. This is the number of rotations an object does for a certain amount of time. Usually, it is measured in rotations per minute or, briefly, just RPM. Just an example: the EV3 large motor does about 150 RPM when using the rechargeable battery and is set at 100% power. We could easily check this with this simple program. First, we have motor A moving for 60 seconds at 100% power. Afterwards, we measure how many rotations it has made using the rotation sensor and display the result. Finally, we leave a ten-second pause so we could see the result. After running the program, you should get the result closer to 150. You could run this program several times in order to find the average speed of the motor. Just as you measure the force applied to an object to make it move in some direction, we'd like to measure the force applied to an object to make it rotate. The last is what the term torque actually means. The greater the torque is, the harder it'll be for the object to stop rotating. For instance, if you make a robot that has to climb up an incline, you'll need to have greater torque applied to its wheels. The next term we'll take a look at is mechanical power. For our purposes this will be the rotational speed multiplied by torque. The power you set in the settings of the move blocks is actually the mechanical power of the motor. For convenience, I will refer to it as just power. Now, let's take a look at a simple gear system. The red gear is directly attached to the motor via an axle. This is the input gear and I'll refer to it as driver gear. The blue one which is connected direcly to the tyre, or the one that outputs the motion from the gear system, will be called follower gear. Now let's see the gear system in motion. As you can see, the follower gear rotates much faster than the driver gear. You can count the teeth of the driver gear or just trust me that they are 40. The follower gear has only 8 teeth. So, for one rotation of the driver gear 40 teeth will go through the point of the engage and for each tooth of the driver gear that passes through that point a tooth of the follower gear should pass. But the follower gear has only 8 teeth, so for one rotation of the red gear which has 40 teeth it will make five rotations. This means we have increased the rotational speed five times. As I mentioned, the rotational speed multiplied by the torque gives the power. The power is constant so it does not change. So, the equation is still true, even if we have increased the rotational speed. This means we have decreased the torque five times. So, in this system, we inrease the speed and decrease the torque. In such cases we say that we are doing a gear up. In the opposite situation when the smaller gear, the one with the fewer teeth, is the driver gear and the bigger gear is the follower gear, we'll decrease the speed and increase the torque. In that case we are doing a gear down. Finally, let's put into practice what we have learnt so far. Here I have three five-minute bots. The first one has no gear systems. The second one is geared down and the last one is geared up. All three robots are set to move forward for 1 second at 100% power. First, let's run the geared-up one.
It reached this far but returned a bit because of the inertia and backlash - terms we'll be discussing in future tutorials.
Next, we have the geared-down robot. This robot has much more torque but traveled far less distance than the geared-up robot.
Finally, we have the robot without any gears. It traveled more distance than the geared-down robot but a third of the distance traveled by the geared-up robot. We'll stop here with the first part of the gear tutorial.
Курсове и занятия включващи този Урок
Този Урок е използван в следните курсове и занятия.

Instructors Remote Training
If you are working with students and you want to introduce Robotics to your class or you want to mentor a FLL team, but you are insecure about your technical knowledge in the Robotics field, then this is the right place for you. Having in mind teachers' busy schedule, we have design two different schedules and added an option to design one just for you. FLLCasts's Mindstorms EV3 Robotics Online Training is the perfect match for any teacher.
After the completion of each task the participant has to upload his solution for verification.
- 183
- 280:11
- 156

Mechanics
Зъбните колела могат да бъдат силен инструмент в ръцета на този, който знае как да ги използва. В този материал ще се запознаем с основни определения и понятия , свързани със зъбните колела.
- 6
- 0
- 7
- 3d_rotation 0

A Robot A Day Keeps The Questions Awake
"How to use the LEGO robots to facilitate the learning of robotics by my student at home" or simply put - "what to build now?"
After enrolling in this course we will send you a few (1-2-3) emails each month with a title "A robot a 'day'". Each email contains a robot building instructions and/or video tutorials and/or tasks that should be accomplished. After a task is accomplished we might sometimes ask for a video or picture.
This process gives a structure of the learning process where you can learn from the content. The student participates in a course, but from home and on the schedule that you decide.
- 26
- 98:39
- 47
MotoCar Bot. Work with gears and levers. Two magic tricks at once. Robot 5
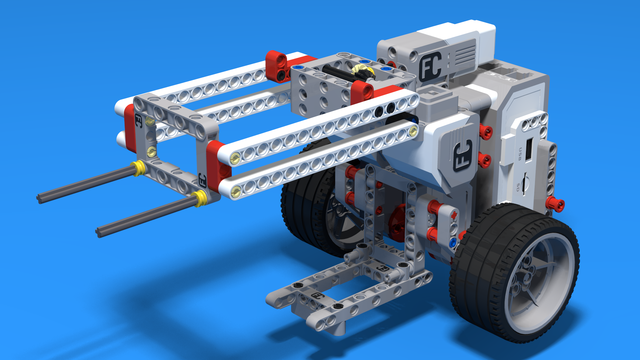
„Как да построим виличен повдигач, като използваме само зъбни колела и лостове без рейка“… Добре, трябва да признаем, че това е труден въпрос. Дори звучи трудно. Затова нека започнем с нещо лесно. Един ЛЕГО Mindstorms EV3 робот. Той повдига обекти във въздуха. Използва две зъбни колела, които работят заедно и се движат в различни посоки, като са перпендикулярни едно на друго… Това изречение започна отново да звучи трудно… Нека опитаме отново.
Следвайте инструкциите с тези 70+ стъпки и ще получите чудесен робот, като заедно с това ще научите лесен трик за използване на зъбни колела и промяна на посоката, в която те се въртят.
- 8
- 0
- 3
- 3d_rotation 1

FIRST LEGO League Competition. Attachments
This course is a collection of materials for many of the attachments that we've built at FLLCasts before introducing courses. The videos were built as separate different attachments for different competitions and with the following course, we try to give it a structure.
- 60
- 347:26
- 0
How to on Attachments with Gears
Зъбните колела могат да бъдат силен инструмент в ръцета на този, който знае как да ги използва. В този материал ще се запознаем с основни определения и понятия , свързани със зъбните колела.
- 6
- 0
- 0
- 3d_rotation 8

EV3 Basic Course. Introduction to robot programming, construction and sensor use
This course is designed for students, mentors and teachers that are completely new to LEGO Mindstorms EV3 robots and would like to start using them to learn, in classes or at competitions. It is quite different from previously built resources at FLLCasts because it makes no assumption on any previous knowledge and tries to introduce everything step-by-step.
- 38
- 193:26
- 30

LEGO Gears. Theory, how to and basic usage
Зъбните колела могат да бъдат силен инструмент в ръцета на този, който знае как да ги използва. В този материал ще се запознаем с основни определения и понятия , свързани със зъбните колела.
- 2
- 0
- 4
- 3d_rotation 3

Забавното ниво - въведение в LEGO роботиката чрез игри
Това ниво цели да въведе учениците ни в света на LEGO роботиката, използвайки игри. В занятията използваме предизвикателства и мисии с цел учениците да искат да ги преминат. Така те усвояват знанията, защото са им нужни за да съживят роботите си.
Част от игрите включени в курса са футбол, боулинг и изстрелване на хартиен самолет. Нивото работи с ученици от 8 до 12 години и дори по-големи, които също ще се забавляват с игрите с роботи.
- 38
- 42:14
- 40
Занятие 10 - Състезание по кликания
Зъбните колела могат да бъдат силен инструмент в ръцета на този, който знае как да ги използва. В този материал ще се запознаем с основни определения и понятия , свързани със зъбните колела.
- 1
- 0
- 1
- 3d_rotation 0

Роботика с LEGO - Ниво 1.5 - Шпионски игри
Второто ниво от учебната програма по LEGO роботика за ученици от пети до дванадесети клас.
Учениците строят множество роботи с вериги и се запознават с физическите понятия инерция и център на тежестта. Изучават се възможностите на зъбните колела, тяхната употреба и основни конструкции, в които могат да бъдат включени.
В програмирането се въвежда новото понятие за „условие“.
Роботите започват да стават по-умни, като могат самостоятелно да вземат сложни решения. „Шпионски“ роботи преследват своите цели, като се пазят да не бъдат забелязани. Въвежда се сензорът за светлина, който роботите използват, за да разпознават цветовете на търсените от тях обекти. Роботите могат да спират на черна линия и да следват маршрут, отбелязан с цветна линия на пода.
Най-сложната мисия на шпионина в края на нивото е да се превърне в сумист и да победи всеки друг робот на ринга.
- 56
- 12:47
- 136
Занятие 5 - Танк със Зъбни колела
Важно е да даваме обратна връзка за учениците си. Стараем се да го правим редовно по време на курса. По-долу следва описание какви рангове пишем училището по роботика и кои аспекти от поведението на учениците ги определят.
Днес трябва да поставите рангове на учениците си според инструкциите тук.
- 4
- 3
- 2
- 3d_rotation 2
Ниво Г - "Военни Технологии" - Роботика с LEGO
Четвъртото ниво от учебната програма по Роботика с LEGO за ученици от втори, трети и четвърти клас.
Учениците строят множество роботи с вериги. Въвежда се сензорът за светлина, който роботите използват, за да разпознават цветовете на обектите около тях. Запознават се с възможностите на зъбните колела, тяхната употреба и основни конструкции включващи зъбни колела. Роботите могат да спират на черна линия и да следват маршрут отбелязан с цветна линия на пода.
- 37
- 6:37
- 111
Занятие 3 - Зъбни колела
Въведение
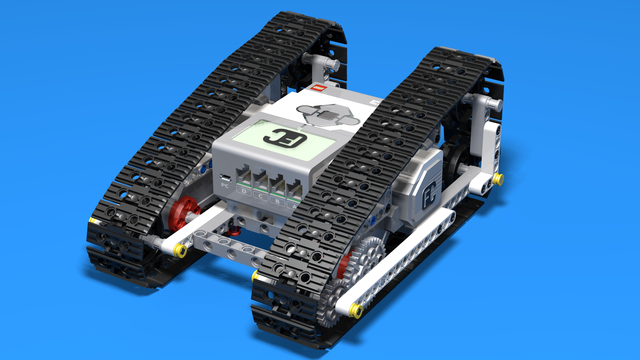
Днес отново ще строим танк. Днешният танк ще бъде малко по-голям от предишния и ще използва зъбни колела. Ще се запознаем с това как можем да използваме зъбните колела, за да променяме скоростта и силата на робота.

- 3
- 3
- 2
- 3d_rotation 2
Роботика с LEGO - Ниво 4.5 Време за игра
Осмото ниво от учебната програма по LEGO роботика за ученици от пети до дванадесети клас.
С помощта на роботи създадени за игри между учениците се упражнява работа с променливи. Роботите пазят натрупаните точки от играчите и правят пресмятания с информацията в променливите. Постоянно се използват познатите вече собствени блокове за групиране на функционалност. Въвежда се понятието поведение и програмите на роботите са организирани в множество нишки, които си обменят информация. В края на нивото роботите генерират задачи с числа, чрез които учениците трябва да съставят уравнение.
- 35
- 13:40
- 221

Занятие 2 - Дърпане на въже със зъбни колела
Въведение
В това занятие отново ще правим дърпане на въже, но този път ще бъде доста по традиционно!
Хареса ли ви дърпането на въже в миналото занятие? Как бихте го подобрили?

Вече се разбрахме, че не харесваме да се въргаляме по земята, след като сме паднали по време на игра на дърпане на въже. За щастие, ние можем да направим роботи, които да вършат тази работа вместо нас! Това ще направим сега, робот, който да дърпа други роботи и по възможност да ги издърпва.
- 3
- 4
- 22
- 3d_rotation 0