Съвети и често срещани грешки, когато трябва да свържете две греди.
- #433
- 03 May 2017
- 4:58
- LEGO MINDSTORMS, LEGO Education SPIKE Prime, LEGO MINDSTORMS EV3
- EV3, Construction, Classes with students
Свързвайте в две точки
Когато искате да сглобите две греди, трябва да използвате поне два щифта, защото в противен случай частите ще се въртят:
Щифтовете трябва да са отдалечени
Ако поставите двата щифта твърде близo, конструкцията отново ще е нестабилна:

За да е стабилна, трябва да има разстояние между тях.

English
Sometimes in our courses we set a task where you should freely extend a robot construction with a few parts so that at the end you have for example a touch sensor at the front or a light sensor pointing down or probably a middle motor somewhere and we don't provide any instructions for this. So, we leave this to the students to come up with different solutions. And in this video I would like to stop at some of the principles that you should follow when freely extending a construction without following a PDF instruction. There are a lot of parts in your Mindstorms set and you can group them in different categories. Some of these categories are for example straight beams or angled beams or pins or beams with pins and you can discuss and you can use them as a group. And the first task that I would like to show you is how to connect 2 beams to each other. After you follow a number of our instructions it is very easy to understand how you connect one beam to another but what's the point of the video is to discuss how you extend one beam with another. So, you have this length but you need to for example add the touch sensor here. And now you must extend this beam with another beam. The first thing that you could do is just use a blue pin like this and then extend with the white beam. And then you can add the touch sensor. Now, that's a solution but what happens here is that the two beams rotate. One of them rotates. Why? Because we have the connection with only one pin - the blue pin. A better way and actually more correct way is to use a second pin like this. Now, this will prevent the rotation but if you apply some force at the end of the beam, it will actually move. It will bend. So, even the more correct way is to do the construction like this. For example, you can leave a number of holes between the different pins and then connect them. How many? 2, 3, 4 Leaving 10 is probably too much but don't put the pins next to each other when you extend one of the beams with another beam. Now the whole construction is much more durable and much more difficult to bend. Here is an example. We have the touch sensor, we have a beam and now we'll extend our robot. We have 3 holes at the right side of the construction of the brick and we'll use these 3 holes. We can think of them as a beam and I'll add one pin and if we leave it with one pin, you can see that it rotates. We can use a black pin and in this way we won't have a gap between the beam and the brick then we should add a second pin right here and even if we apply some force at the end of the beam, it is not rotating and it is not bending. Then we use the touch sensor and it's again the same principle. We add one pin, we add a second pin. Now, here we can use the black pins or the blue pins - the longer ones.
And this is one example for extending. We can even extend further. We can take one more beam, a number of pins
and extend even further. Now that's a stable, durable construction where the robot could move forward and if we have a touch sensor at the front, it can even detect the touch sensor pushing to a wall for example.
Курсове и занятия включващи този Урок
Този Урок е използван в следните курсове и занятия.

EV3 Phi. Introduction to robotics with LEGO Mindstorms
The things that you will be able to do with your EV3 robot by the end of this course are:
Freely move your robot towards desired target;
Avoid obstacles on the path of your robot using sensors;
Follow lines of any shape;
Detecting and picking up objects of any kind;
- 92
- 220:20
- 36

Extending without instructions. Basic principles
Съвети и често срещани грешки, когато трябва да свържете две греди.
- 4
- 0
- 0
- 3d_rotation 0

Роботика с LEGO - Ниво 1.0 - Приключение в Космоса
Първото ниво от учебната програма по LEGO роботика за ученици от пети до дванадесети клас.
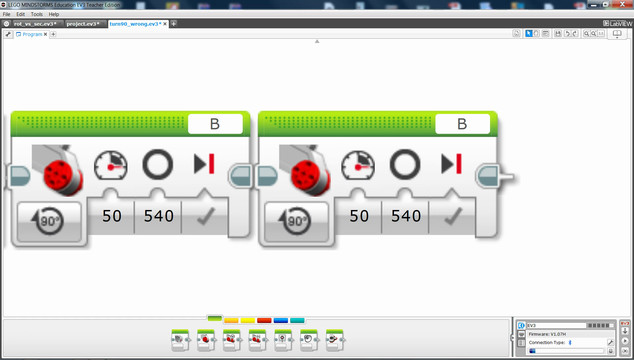
В нивото се изграждат различни конструкции на роботи. Управляват се моторите така, че роботите да извършват прецизни завои около „земята“ и „луната“. Преодоляваме различни препятствия след като се блъснем в тях благодарение на сензора за допир.
С помощта на сензора за разстояние роботът се движи без да се блъска в заобикалящите го препятствия. Достигаме до понятията цикъл, градуси, среден мотор. Накрая роботите могат да изпълняват едновременно две различни неща - докато изпълняват мисии върху специално изградено поле, третият двигател разчиства засечени обекти.
- 126
- 123:52
- 150
Занятие 3 - Разчистване на площадка за кацане
Въведение
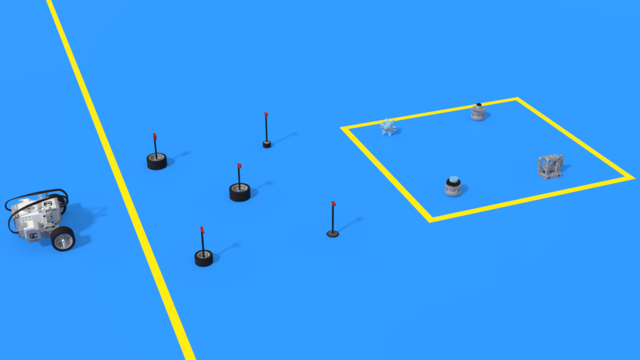
Днес ще построим робот, който разчиства автоматично площадка за кацане.
Преди да кацнете с космически кораб на Луната, изпращате робот, който да почисти площадката за кацане. Вашият робот ще бъде пренесен с ракета до Луната и задачата му е да разчисти площадка за кацането на вашия по-голям кораб.
Роботът каца малко по-далеч от площадката, която трябва да разчисти и за това трябва да навигира до нея. За съжаление пътят му е затрупан със скали, които не може да премести и трябва да ги заобиколи.
- 9
- 4
- 2
- 3d_rotation 0
Роботика с LEGO - Ниво 1.0 - Приключение в Космоса
Първото ниво от учебната програма по LEGO роботика за ученици от пети до дванадесети клас.
В нивото се изграждат различни конструкции на роботи. Управляват се моторите така, че роботите да извършват прецизни завои около „земята“ и „луната“. Преодоляваме различни препятствия след като се блъснем в тях благодарение на сензора за допир.
С помощта на сензора за разстояние роботът се движи без да се блъска в заобикалящите го препятствия. Достигаме до понятията цикъл, градуси, среден мотор. Накрая роботите могат да изпълняват едновременно две различни неща - докато изпълняват мисии върху специално изградено поле, третият двигател разчиства засечени обекти.
- 126
- 123:52
- 150
Допълнителни задачи за да направим истинска снимка на далечната страна на Луната
Време да приложим всичко научено досега на практика. Да направим робот шпионин!
- 3
- 0
- 6
- 3d_rotation 0
Роботика с LEGO - Ниво 2.0 - Роботи в производството
Третото ниво от учебната програма по LEGO роботика за ученици от пети до дванадесети клас.
Роботите започват да използват по два или три сензора едновременно и учениците създават по-сложни програми за тях. Изучава се действието на диференциала и как той помага на роботи с един задвижващ двигател да завиват. Роботите си взаимодействат като си предават информация или детайли един на друг и учениците изучават задълбочено как да следват линия по-плавно. В края на работния ден роботите излизат от поточната линия и се възстановяват с игра на волейбол.
- 44
- 15:01
- 129
Конструиране
Съвети и често срещани грешки, когато трябва да свържете две греди.
- 2
- 0
- 3
- 3d_rotation 0

Python за EV3 LEGO Mindstorms - ниво 2
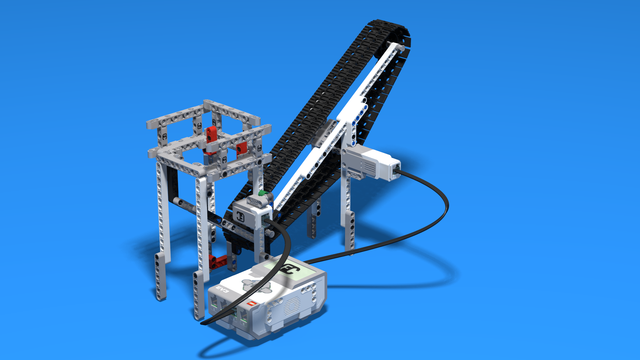
Във второто ниво по Python за EV3 роботи учениците изучават в дълбочина сензора за допир. Сензорът се разглежда както като средство за ръчно управление на машини, така и като сензор за автономни роботи. В няколко занятия учениците изграждат пулт за управление на хващача и движението на кран. От страна на програмирането учениците изучават конструкциите за разклоняване на код "if-else", условните и безкрайни цикли с "while" и операторът за обръщане на условие "not". В края на нивото роботите могат да усещат препятствия които да избягват и излизат от простичък лабиринт.
- 39
- 19:58
- 93
Припомнете си
Съвети и често срещани грешки, когато трябва да свържете две греди.
- 2
- 0
- 0
- 3d_rotation 0

Ниво A - Въведение - Роботика с LEGO
Първото ниво от учебната програма по LEGO роботика за ученици от втори, трети и четвърти клас.
Едно, “пътешествие из космоса”, но с роботи. В нивото се изграждат различни конструкции на роботи. Управляват се моторите така, че роботите да извършват прецизни движения около „земята“, „луната“ и „слънцето”. Преодоляваме различни препятствия след като се блъснем в тях благодарение на сензора за допир. Изграждаме и програмираме роботи, които могат да се сражават и защитават стига това да се наложи.
- 142
- 133:42
- 187
Занятие 5 - Разчистване на площадка за кацане
Важно е да даваме обратна връзка за учениците си. Стараем се да го правим редовно по време на курса. По-долу следва описание какви рангове пишем училището по роботика и кои аспекти от поведението на учениците ги определят.
Днес трябва да поставите рангове на учениците си според инструкциите тук.
- 11
- 3
- 5
- 3d_rotation 0

Ниво A - Пътешествие из космоса - Роботика с LEGO SPIKE Prime
Първото ниво от учебната програма по LEGO роботика за ученици от втори, трети и четвърти клас.
Едно, “пътешествие из космоса”, но с роботи. В нивото се изграждат различни конструкции на роботи. Управляват се моторите така, че роботите да извършват прецизни движения около „земята“, „луната“ и „слънцето”. Преодоляваме различни препятствия след като се блъснем в тях благодарение на сензора за сила. Научаваме любопитни факти за Слънчевата система и за космическите апарати.
- 65
- 30:30
- 76

Занятие 5 - Разчистване на площадка за кацане
Важно е да даваме обратна връзка за учениците си. Стараем се да го правим редовно по време на курса. По-долу следва описание какви рангове пишем училището по роботика и кои аспекти от поведението на учениците ги определят.
Днес трябва да поставите рангове на учениците си според инструкциите тук.
- 7
- 4
- 12
- 3d_rotation 2
Ниво A - Въведение - Роботика с LEGO
Първото ниво от учебната програма по LEGO роботика за ученици от втори, трети и четвърти клас.
Едно, “пътешествие из космоса”, но с роботи. В нивото се изграждат различни конструкции на роботи. Управляват се моторите така, че роботите да извършват прецизни движения около „земята“, „луната“ и „слънцето”. Преодоляваме различни препятствия след като се блъснем в тях благодарение на сензора за допир. Изграждаме и програмираме роботи, които могат да се сражават и защитават стига това да се наложи.
- 142
- 133:42
- 187
Занятие 4 - Завой около Луната
Въведение
Днес роботът ни ще бъде космически кораб като предният. Целта ни днес, обаче, е конкретна: Да достигнем до далечната страна на Луната!
Къде се намира далечната страна на Луната? Защо е толкова трудна цел?
- 13
- 4
- 5
- 3d_rotation 1