

Three types of generations. Robotics Game of Life
There are basically three type of generations in the robotics game of life.
- #270
- 10 Mar 2016
There are basically three type of generations in the robotics game of life.

This video tutorial reviews the EV3 Gyro Sensor and the HiTechnic Gyro Sensor for the LEGO Mindstorms NXT robotics Kit. We compare the two sensors and demonstrate them in action.

We start a course for following a line with crosses and gaps. This is a challenge that one of the users at FLLCasts.com was trying to accomplish and asked us for advice. We present the whole challenge to you step-by-step. But first, let's also see the whole run of the line following algorithm. With this course, we also do an introduction of using State Machine as a programming pattern.

The robot works on the field and decodes the different colours that represent the rows and the columns.

There are a number of tools available online to help you play the game. You just seed the initial conditions and leave the game. Let's look at some of the sites.

An interesting question that has arise is whether we can use the LEGO Mindstorms EV3-G Software to program the NXT brick. In this episode we will go through the blocks from the EV3-G Software and see which works with the NXT Hardware and which does not.

We have previously aligned to lines with the Color Sensors. In this series we are doing the same program, but with Ultrasonic Sensors that are aligning the robot to a Wall.

All worked as expected, up until know because the robot got lost. This happens when we turn right and the line does not continue to the right. Now the robot must somehow understand that it is "lost" and escape.

След като вече изпробвахте и се справихте с предизвикателство, включващо поредица от инструкции, искаме да ви представим някои добри практики.

To control the VEX Cortex controller we must use a software. In this episode we would download the software from the VEX site. Strange thing is that you must select your region correctly even if you are not in this region
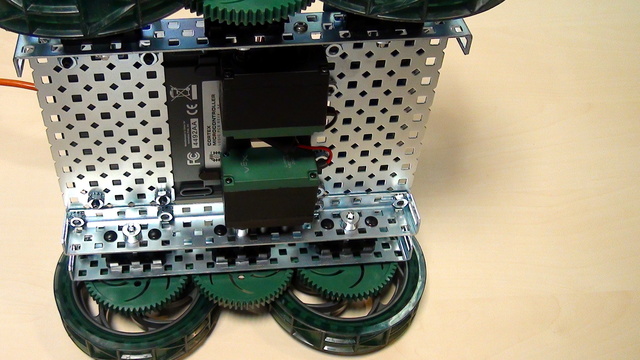
Conenct the motors of the VEX EDR motor to the VEX Corted Controller. For connecting we need the motor drivers.
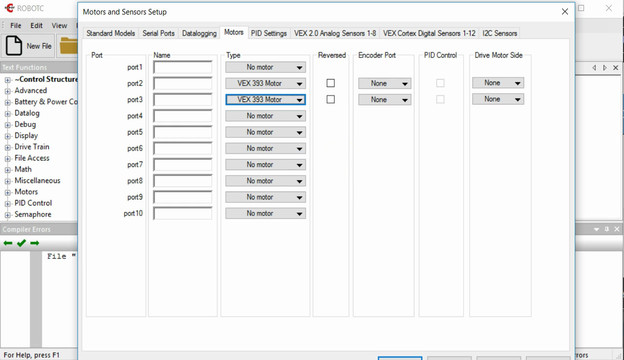
The comunication between the motors and the controller should be configured in the RobotC software. Each motor could be connected on a different port and the goal of the video is to show you how.

We are ready to build the first program for moving the robot forward and backward. We learn how to build simple programs for moving the program. But it is not that easy...downloading to the robot does not always result in the robot moving.

In the RobotC software we could make the robot wait for a couple of seconds by using the wait function. This will give the motors a chance to work and this will actually move the robot.

Now that we know how to make the robot move forward let's see we can make it move backward.

In this episode we combine in a single program the previous two programs for moving forward and backward.

Once you start turning how to do you a whole 180 degrees turn. The robot almost does it, but not completely

In the EV3-G software, you could use negative numbers for power and rotations. In this episode, we would look at what is the meaning of this numbers and make a few notes of where the teacher must be more careful.

We start with FIRST Technical Challenge and how you develop programs with the GamePads. It is up to you to decide how sticks, buttons and triggers from the GamePad will control the different motors of the robot and there are different decisions that you should make.

In this tutorial, we connect the Motorola phones to the Tetrix controller using the USB hub.
