

WRO Junior-High 2015. Treasure Hunt. Part 2. Rules
We would look at the rules of the competition over our small model and we would start solving the field.
- #199
- 10 Apr 2016
We would look at the rules of the competition over our small model and we would start solving the field.

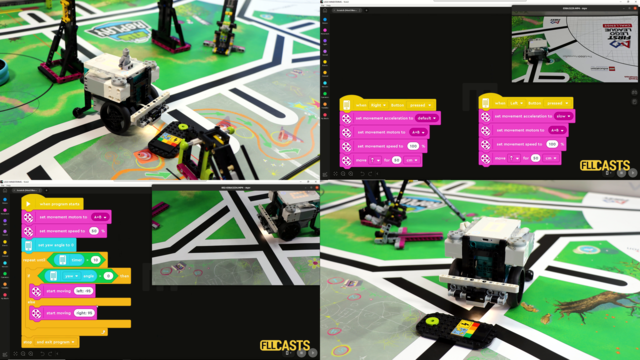
It's inevitable. While following this gapped line we would reach a gap. The robot must somehow understand that there is a gap and must make a decision on what to do. For detecting the gap we use the Rotation Sensor. Not the most popular, but very convenient in many cases. Check out the video.

Spinning with the VEX EDR robot involves the use of both motors. The left and the right. Every robot with wheels could spin and this makes not exceptions.

The previous tutorial showed you how to copy/paste instructions in RobotC. The current video will introduce you to loops.

Building instructions for the robot used in WRO 2014. It is a small robot with two light sensors and could be used for collecting elements.
The robot is built from LEGO Mindstorms EV3 parts.

Following the previous tutorials from the course, implement the calibration of the minimum and maximum values.

One of the smartest things you could do in any software program is to extract logic in small reusable, simple, understandable units. In EV3-G these are called Blocks and we are going to extract the logic for finding a minimum and maximum for each of the sensors in a new block.

The integral part "remembers" the errors that the robot has made in the past and we can compensate for those errors. This will make the robot return back to the line that we would like to keep it aligned.

This video tutorial is about understanding the "magic". In this video tutorial, we would conduct an experiment and will look at how exactly does the integral part of the PID algorithm compensate for the error that the LEGO Mindstorms EV3 robot makes.

We should multiply the error by a certain number and then add it to the steering of the LEGO Mindstorms Steering block. In this way, by changing the coefficient we change how much/fast should the proportional part influence the steering of the robot.

Example of making turn using only one motor

This is a program that sets the VEX IQ Controller to control the Roberto Bot With Four Bars Lifting Mechanism, and also Sports Chassis With Eight Bar Lifting Mechanism - VEX IQ Robot.

With this program you can drive the Truckie or every robot with the same port settings. It is easy to drive with that set up because you use the left stick to control the speed and the right stick to steer. The benefit according to Truckie Hard To Drive VEX IQ Program for Modkit is that this set up uses both sticks to control the movement. Probably you will use this stick setting in the VEX competition and practicing this type of setting will be very useful for your driving skills to grow. Ones you have master this driving technic you will be more relaxed while you are on the competition.
After you feel satisfied with your driving skills and you have accomplished all the goals you can continue with the competition driving program settings.
This program is mainly for controlling Truckie VEX IQ robot.

This program is developed with LEGO Education SPIKE App Word Blocks and is used to accomplish a Power Switch mission model with a heavy lifting attachment attachment placed on Luly, small LEGO Education SPIKE Prime competition robot with 3D building instructions.

In this program we demonstrate how to program a SPIKE robot to follow a line with the aid of one color sensor and detect an intersection with another color sensor. Make sure the line is big enough for the sensor to detect it and react to it. For some thinner lines, the speed of the robot can be lowered, but if that does not help, the program can be easily adapted to work with reflected light intensity.
This program was intended for and tested on the Gazon robot
To successfully advance at competitions we need to understand two concepts - how to reliably and consistently navigate the field and position the robot exactly where we need it to be on every run, and how to build attachments that would accomplish a mission model once we have reached it. This course is focused on the first part. The second part is the whole FLLCasts platform, but start at FIRST LEGO League with LEGO Mindstorms Robot Inventor. "Challenge" competition for 9-16 years old.
The goal of this course is to help you learn to program LEGO Robots using Scratch and make them behave consistently and reliably during competitions. As a language we use LEGO MINDSTORMS App Word Blocks which is based on Scratch. We look at a lot of concepts that could be used for FIRST LEGO League and World Robot Olympiad competitions - for example, how to follow a line fast, slow, in a smooth way, with 5 states. Also, how to align to lines, how to do double align, how to keep a straight line with a motion sensor.
Unfortunately, LEGO discontinued the robot series during the making of this course which is why it's kind of shortish. You could use the SPIKE Prime course for a more in-depth analysis.




