

EV3 Phi. Turning around a pole - introduction to the module
Let's make a competition - there is a pole that the robot must turn around and return home.
- #381
- 17 Mar 2017
Let's make a competition - there is a pole that the robot must turn around and return home.

We will explain inertia non-scientifically so that we make it easy to understand concept.

Rubber bands in the LEGO Mindstorms sets are very handy when it comes to collecting objects, especially loops. The mechanism most of the time could work like this - an axle is pushed, a rubber band is released and a lever collects the loop.

We should how to build a frame that could hold the attachments for specific competition missions. This frame is added in a pinless manner. This means very fast and easy without any glitches of the pins.

The last fifth construction is larger compared to the previous constructions. It is wider. It has four sensors and you can take a larger load all by keeping the robot stable.

Как да използваме блокчето за дисплея, за да показваме изображения с EV3-G софтуера.

Display a matrix on the brick screen. Simple and easy. Download and run the program to see how

One of the most interesting challenges in the series of FLL Competitions. Move a block and add additional floor on top of the block without damaging the construction. In this tutorial we would focus only this mission and we would achieve two movements with only one motor which makes the attachment quite powerful.

Опитайте сами да поставите сензор за допир на робота.

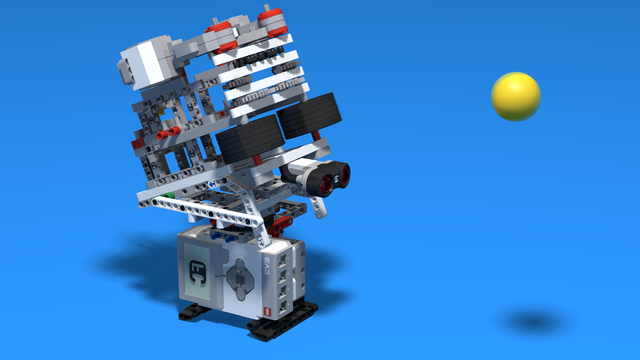
This frame holds the motor and ev3 brick used in the catapult. The frame is placed on top of the rotating base and thus could be easily rotated. The brick could be both NXT and EV3

This LEGO attachment connects a LEGO Mindstorms EV3 Motor with a LEGO Technic Linear Actuator. The connection is through a couple of gears which makes the whole instructions quite interesting and useful as an example.
The attachment was used during FIRST LEGO League 2014 Robotics competition.

What should you do as a teacher when the students are calculating the gear ratios and number of needed rotations?

Instructions for building the quick attachments for this LEGO robot

Това е база за робот, при който блокът е обърнат наопаки. Гледали ли сте Странни неща? Трябва да признаем, че този робот не прилича много на „Демогоргон“, но именно в това се крие предизвикателството. Можете ли да използвате тази база и да направите така, че роботът да прилича на Демогоргон? Добавете снимка в раздела с коментарите под материала.
Имате ли други идеи за Демогоргони? Направете ги с ЛЕГО и добавете снимка под този материал или я изпратете на адрес team@fllcasts.com. Ще я включим в FLLCasts.com.
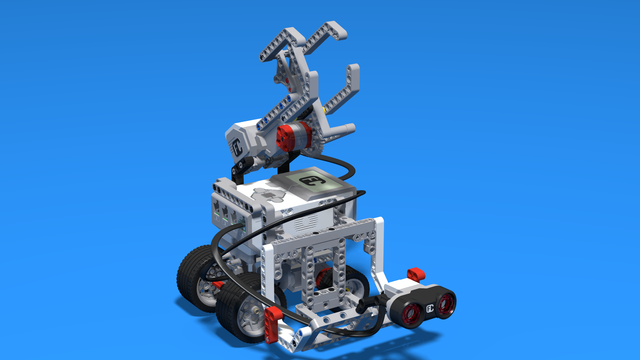
Инструкции за конструиране на количка от Лего, която може да изтрелва 40мм пластмасови топки за пинг понг. Роботът се задвижва от два големи EV3 двигателя, а приставката, изстрелваща топките, от среден EV3 мотор. Роботът може да носи до 6 топки и разполага със сензор за разстояние.
Минтонет (от англ. Mintonette) идва от името на една от първите версии на волейбол.
Роботът може да се движи само настрани, без да завива, с помощта на един голям EV3 мотор. Друг голям мотор се използва, за да изстрелва топката. Има и сензор за разстояние, с който може да засича друг робот, на който да подаде топката, или кош, в който да вкара топката.

Тази програма позволява на робота Радърфорд да измерва скоростта на приближаващите автомобили и да ги забавя ако се налага.
Тази програма е за Мидас - ЛЕГО мида робот. Програмата прави робота да засича кога бива отворен и тогава да се затваря. За да засече отварянето и като крайна граница за затварянето, програмата използва ротационен сензор.

Here is Lintu. It is a marvelous LEGO Mindstorms EV3 Animal robot that looks like Kiwi, the famous New Zealand bird. It is quite rare to see a Kiwi bird in person. But fear not, we've prepare a robot that looks almost exactly like the original.
This program gives your robot few reactions to having its button pressed. All of those reactions are added in the "Random" program, along with a function trying to predict the press of the button. The robot instructions you can find here.
