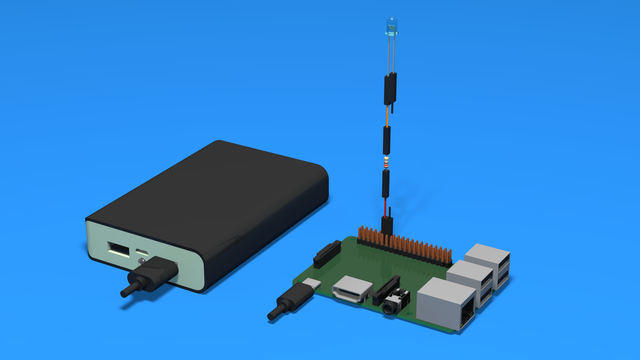
How to Add a diode to indicate controller power up - 3D Scheme
3D Instructions on how to add a diode to the Raspberry Pi and indicate when the Raspberry Pi is turned on.
- #502
- 10 Apr 2018
3D Instructions on how to add a diode to the Raspberry Pi and indicate when the Raspberry Pi is turned on.
Ние обичаме танкове. Вие обичате танкове. Всички обичат танкове. Е, може би не всички - по-скоро всички обичат машини с вериги, тъй като те са интересни, не толкова често срещани, лесни за конструиране и могат преодолеят множество препятствия.

Първото ниво от учебната програма по LEGO роботика за ученици от втори, трети и четвърти клас.
Едно, “пътешествие из космоса”, но с роботи. В нивото се изграждат различни конструкции на роботи. Управляват се моторите така, че роботите да извършват прецизни движения около „земята“, „луната“ и „слънцето”. Преодоляваме различни препятствия след като се блъснем в тях благодарение на сензора за допир. Изграждаме и програмираме роботи, които могат да се сражават и защитават стига това да се наложи.


Следва първата ви задача и ще ви покажем как да използвате инструмента Задачи.

Инструкции за конструиране на камион от ЛЕГО. Камионът е замислен като военно-транспортен, но може да бъде използван за транспортиране на най-различни предмети. Конструкцията е със задно задвижване, като всяко от задните колела е задвижвано от по един голям ЛЕГО мотор. Предните колела завиват с помощта на среден мотор. Брикът е закрепен отпред на конструкцията и позволява допълнителното закрепване на различни сензори, в зависимост от целта.

Probably the largest multi-purpose FLL attachment at FLLCasts. These attached is doing a number of missions at once. 4 of them. You attach it to the robot and start the program. The robot moves and accomplishes a number of missions using only this attachment. At it also has a lot of parts. It is quite large and you can not build it from a single set. But that's ok because you are preparing for a competition, right?

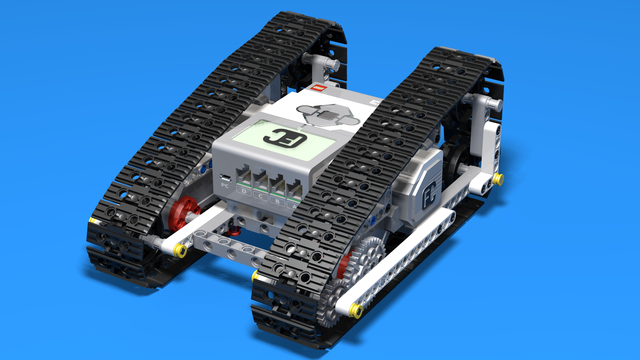
Инструкции за конструиране на прост робот с верига. Всъщност, този робот е опростена версия на танка Фрийдъм Фолк Рейс. Всички сензори за разстояние са премахнати и роботът може да се използва за решаването на множество различни задачи. Конструкцията много допада на учениците и е достатъчно проста, за да се включи в учебната програма.

Инструкции за построяване на Катапулт от ЛЕГО Mindstorms EV3. Роботът има мотор, съединител, с който ръчно се контролира кога катапултът да стреля, и сензор за допир, който позволява автоматично зареждане. Долната рамка е махната, което означава, че роботът няма да може да се върти. В същото време обаче без нея катапултът става достатъчно малък, за да може да се построи по време на занятие.

Here is another great example of a large multi-purpose attachment used in FIRST LEGO League competitions. This one is specifically for the 2017-2018 Hydrodynamics competitions and is doing a number of missions. (01) Pipe removal, (06) Water Treatment and (08) Manhole cover.
The attachment consists of two parts. The first part is placed on the robot while the second part is in front of the robot and the robot pushes it. While working on the field the robot leaves the second part on the Water Treatment plant and when returning back collects it back and returns to base.
The goal of the attachment is for you to build it and experiment with it with the existing field. Use Box Robot 2 as a robot base on which to add the attachments.

Съединителят е механично устройство, което предава или не предава въртеливо движение. Днес ще видим как можем да конструираме такъв елемент, като използваме ЛЕГО.

In this course, we would like to introduce you to multi-purpose attachments. These are attachments designed to accomplish a number of missions when the robot goes out of the base in the FIRST LEGO League competitions.
You've all seen them. They are kind of large, powered by a few motors and sometimes use rubber bands, levers and other mechanisms.
Use the course as a preseason preparation and try to solve the tasks to prepare for next year competition. Even if you don't have the field, build the attachments and follow the tasks to inspect their behaviour. Modify them as needed when said.
This is the first draft of the course including only the attachments in different sections. If you are interested in learning more please enrol in the course and in the next few weeks we would try to record the video tutorials.

Целта на тези инструкции е да ви помогнат да построите ЛЕГО Mindstorms EV3 робот без колела. Трябва вие сами да помислите как точно да поставите колелата. Какви колела бихте използвали отпред? Как ще построите третото колело? Ето тук има някои препоръки за това как да построите третото колело - 1, 2, 3, 4
Можете да добавите хващач към тази конструкция по инструкциите тук.

Използвайки настройката Включен за градуси (ротации) на Блокчето за управление на среден мотор, ние задаваме на мотор колко градуса да "измине". Понякога, обаче, ни е необходимо да му задаваме на каква позиция в градуси искаме да отиде мотора. Това може да го постигнем с даденото блокче. То взима за 0 градуса позицията в която се е намирал мотора при стартиране на програмта. След това като му зададете дадена стойност, то отива на тази позиция, без значение от текущата му. Така например, ако в момента мотора се намира на -20 градуса и изпълним блокчето със зададени 30 градуса, мотора ще "измине" 50 градуса. Но, ако мотора се намира на 10 градуса и изпълним същата програма, тогава мотора ще измине само 20 градуса.

Proportional implementation for keeping the LEGO Mindstorms robot straight. The program will take the value of the Mindstorms Gyro sensor and will apply this value to the steering block. This will make the robot steer in a direction that would put the robot in a straight position again.

The experiment contains a plot of the Curren Power of Motors B and C and the values of the Gyro Sensor when the robot is moving with a power of 100%. What you could see is that it is not actually moving with a power of 100% because the current power is about 75-80%.

Даденото блокче има следните параметри от ляво на дясно:

Даденото блокче има следните параметри от ляво на дясно:

This is a program for communicating with LEGO Mindstorms Bluetooth between two bricks. The goal of the program is to control one of the bricks with another brick. The controller has two touch sensors that control the direction and two buttons on the brick itself that control the power.
The control brick has two motors attached that are controlled.
The goal of this program is to be used as an example of how to use the EV3-G Bluetooth. Yes, it requires two bricks, but most of the schools have two bricks and could test the program.

Сензорът за разстояние работи на принципа на изпращане на ултразвукови вълни към обект. Едното "око" е предавател и изпраща ултразвукови вълни, които се отразяват в обекта и се връщат в другото "око" - приемник.

Part of the Perfect STEM course, you should have a Raspberry Pi and an LED connected on GPIO 18 for this example to work.
