

Differential Lock on BigDaddy Competition Robot (Part 9)
It has been a long road with the last 8 BigDaddy competition robots video tutorials, but we finally arrived at the Differential Lock.
- #80
- 19 Apr 2015
It has been a long road with the last 8 BigDaddy competition robots video tutorials, but we finally arrived at the Differential Lock.

Vision is still one of the very few fields where a human being could outsmart a computer. Still. Colour/Light sensors are the cornerstones of implementing a smart LEGO Mindstorms robot that could at least partially do "vision". In this video tutorial, we are using the robotics sensor to detect loading and unloading of the catapult.

We continue from part 3 where we finished part of the 'rear'. Power is transfered from a motor to the wheels but having about 16 gear wheels makes it more than complex for this LEGO Mindstorms EV3 Competition robot.

We are showing the first way we could position the motors on the robot construction. This seems to be challenging for many robot builders and that's why we are going to do it in a few different ways in the next few video tutorials from the series.

This video lesson is a revised version of Episode #1. Matt Gipson requested it in a comment. Using the EV3-G software we have developed a very simple program for following a line with two LEGO MINDSTORMS color/light sensors.

"What is the light in the room?" - should it even matter. You can use one program for all lighting conditions by calibrating the color/light sensor of the LEGO Mindstorms EV3/NXT robots.
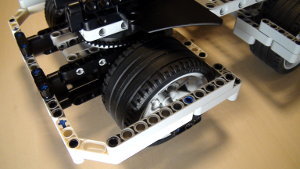
We continue from part 4 where we made a controlled experiment to transfer power from a Mindstorms motor to the rear wheels. The construction was too complex and inefficient and in this video lesson we are improving it by lowering the differential and removing all gear wheels from this LEGO Mindstorms EV3 Competition robot.

This second way of positioning the LEGO Mindstorms EV3 motors on the robot leaves more space for the Mindstorms brick and for attaching a third motor. We are experimenting and showing the advantages and disadvantages of this particular construction.

This third way of positioning the LEGO Mindstorms EV3 motors on the robot seems to be the most productive with the most advantages. We have named it "correct", but we completely understand there might be other even more efficient ways to position the motors on the robot.