
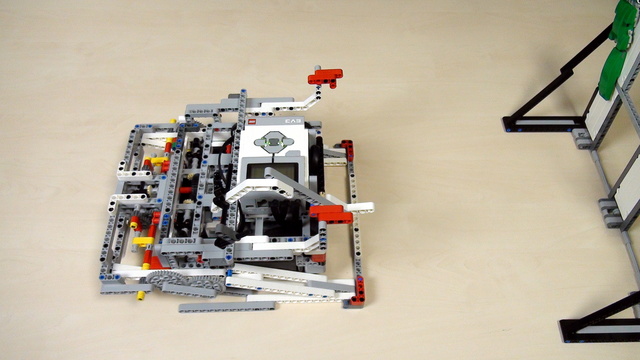
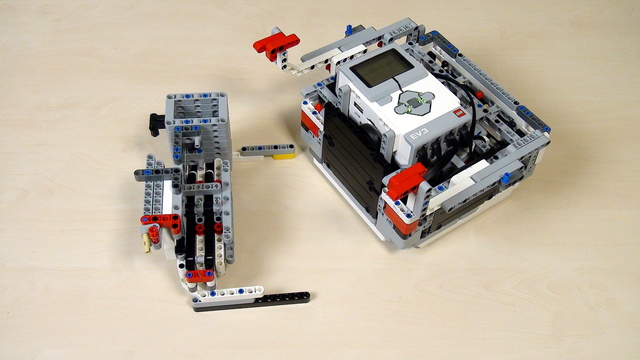
Box Robot Two. Task. Build the right side attachment with vertical axle.
Try to build the attachment following the instructions. Use it to actually solve a mission from any competition (like taking loops)
- #508
- 27 Mar 2017
Try to build the attachment following the instructions. Use it to actually solve a mission from any competition (like taking loops)


It's inevitable. While following this gapped line we would reach a gap. The robot must somehow understand that there is a gap and must make a decision on what to do. For detecting the gap we use the Rotation Sensor. Not the most popular, but very convenient in many cases. Check out the video.

We should multiply the error by a certain number and then add it to the steering of the LEGO Mindstorms Steering block. In this way, by changing the coefficient we change how much/fast should the proportional part influence the steering of the robot.

In this video tutorial, we would do a few experiments with the coefficients for the Integral compensation. There are actually two coefficients - "c" and "b"

Lifting a loop is one of the most common missions in different robotics competitions. In this video we demonstrate how we could do "Vertical lift". It is suitable for precise lifting especially when the mission model requires you to lift straight up. The robot attachment could be adapted to other missions at FIRST LEGO League/World Robotics Olympiad and other robotics competitions that require push/pull. The principle is the same. The tutorial uses Luly, a small LEGO Education SPIKE Prime competition robot with 3D building instructions as a robot base.

The Department of "throwing" is ruled by rubber bands. Impulsive power release in a short amount of time. In this video we are building an attachment that throws a ball and accomplishes the FIRST LEGO League 2012 bowling competition.

This time we stop on "Using the Right Senses" mission, or actually on how to solve the "Right Senses" mission without "Senses" (sensors). To achieve that we use the carabineer counstructed in one of the previous tutorials, of course after a small modification.

In the previous part of the video lesson we showed how imprecise a chain LEGO Mindstorms robot could be if its positioning does not rely on sensors, but only on the use of move block. In this tutorial we will show the same thing, but using robot on tires.

Football with robots could be quite fun. Football with LEGO Mindstorms robots is one of the popular categories for competitions with LEGO Mindstorms Robots.

The previous rubber bands video showed a way to trigger the rubber band without a motor. This video gives one more idea on how to lift an axle and in this way release the rubber band. Use the idea for you LEGO Mindstorms robot constructions.
The FIRST LEGO League competition is similar each year. With a little experience you could accomplish most of mission. The goal of this episode is to introduce you to the course, its purpose and approach.

There are many loops in the FIRST LEGO League competition. In this video we collect some of them by following the idea of the ELM team.

Many FLL competitions have a mission for demolition. You should always destroy something, but destroy it in a regulated manner and probably collect the destroyed mission model after that.

Using a number of axles, beams and rubber bands we collect many loops at once. This is an important part of every competition, mostly of the FIRST LEGO League.

We keep the robot orientation straight while moving, but when we stop the robot could be in a different orientation. This applies for both using the Mindstorms Gyro Sensor when moving straight or the Mindstorms Color sensor when following a line. In this video tutorial, we will do a few examples of when an how this could happen.

We've detected the gap. It's time to move over it. This is difficult because we have to detect where the line is after the 0.1 meters gap on the line following field.

You can collect the car for scrap or repair it. The ELM teams decide to repair it. This requires them to place the engine in the car and it's very interesting to think about this problem.

Based on your feedback we have decided to show you the live process of building a complex LEGO Mindstorms Competition robot without having the whole robot ready yet. We would be making mistakes, showing them and taking up the challenges right in front of your eyes. The first construction would not be perfect but we would eventually arive at it.

In this tutorial we demonstrate how a Drop Mission could be accomplished with a Drop Attachment. The robot attachment could be adapted to other drop missions in FIRST LEGO League/World Robotics Olympiad and other robotics competitions. The principle is the same. The tutorial uses Luly, small LEGO Education SPIKE Prime competition robot with 3D building instructions as a robot base.

One attachment to rule them all...We have seen it and it works -> solving most of the competition models with only one attachment. In this video tutorial without programming we would walk you through the principles and methods of using a single attachment for most of the FIRST LEGO League competition models. One can learn alot from using as few parts as possible to solve as many missions as possible.

In this tutorial of the series we would get into more details on how the flywheel works, what's its purpose and how the whole attachment is triggered with the first rubber band.

"The devil is in the details". We are improving the Rubber band attachment with a Flywheel by introducing a few small, but important modifications that make the whole robot attachment more stable and reliable. With the conclusion of the series this attachment could be used as a basis for some very interesting STEM demonstrations on energy accumulation and conservation.
The next step of lifting a robot to a mission model is to try to use a rack.

Raw footage of the mission. Might upload a more polished version soon

Next important state is Turn Right with our robot. This happens when we detect a line on the right.

Raw footage of how to accomplish the mission. A more polished version might be uploaded soon.

Every time we start the robot we want to start from the same place, not only in terms of where we are on the field but also in terms of how are the motors rotate. The motors have an internal sensor for detecting the rotation. Because of this they know how rotated they are. It is a very good practice to always reset the motors before we start a competition run especially at FIRST LEGO League or World Robot Olympiad competitions