The robot passes completely under the bar any time. Separately, it is held off the mat by the bar at the end of the match.
- #1664
- 31 Aug 2020
- Pull-Up, FIRST LEGO League, FIRST LEGO League 2020-2021 RePlay, Mission Models, FLL, FLL 2020, Tips and Tricks
Scores
- If the robot passes completely through the pull-up bar’s upright frame at any time: 15 max
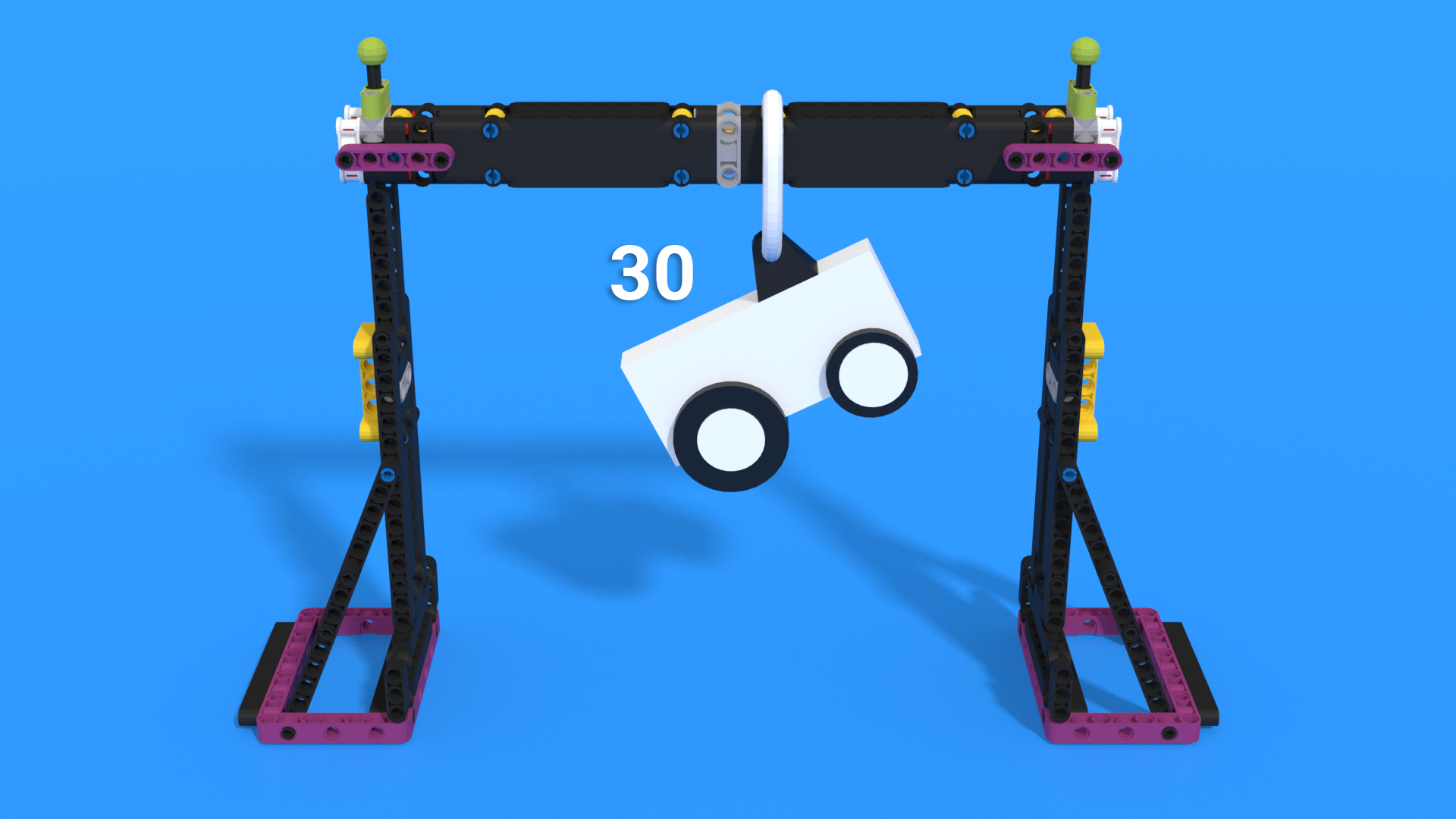
- If the pull-up bar holds 100% of the robot up off the mat at the end of the match: 30
Note:
For the “held up” score, you cannot score this and M07 Robot Dance in the same match.
A “pass through” can score northward or southward, but only one way and only one time. A “pass through” scores at the time it happens. This is a rule R22 exception.
R22 cautions you that if the robot’s accomplishments are wrecked before the match ends, they will not score.
Mission requirements must be visible at the end of the match to count unless a method is required.
• Precisely as the match ends, everything needs to freeze in place for examination.
• Stop the robot, leave it as is, and then keep hands off everything as the referee scores the field with you.
FLLCasts Tip
This mission has two aspects: crossing under and being 100% supported in the air. The first aspect is a must to complete, because it is just manoeuvring you robot to cross under the bar.
If you are a starting team we would recommend completing M07. Robot Dance.
The way to accomplish the pull up if to have a light robot and a sturdy set of gear wheels. In almost every scenario the motors alone would not be able to pull the robot. You would need to construct a system of gear wheels that is for torque. Make that system as secure as possible, skipping gear wheels will not help you!
Courses and lessons with this Tutorial
This Tutorial is used in the following courses and lessons

FIRST LEGO League 2020-2021 RePlay Solutions and review with SPIKE Prime
This course presents Solutions and Review of the FIRST LEGO League 2020-2021 RePlay competition. We do such a course every year after the competition. By moving through the course lessons, building the robot and attachment and completing the missions you will learn how to achieve FLL mission following good engineering principles for building robots, attachments and developing programs. Upon completion of the course you will have many new ideas about how to approach mission on every FLL robotics competition and how to help your team score more points.
- 74
- 158:11
- 15
M06. Pull-Up Bar
This video tutorial is about accomplishing the Pull-Up bar mission from the FIRST LEGO League 2020 RePlay robotics competition. The goal of the mission is to move with the robot and pull the robot up. With this video tutorial you will learn how to build such attachments and how missions that are about lifting the whole robot could be accomplished. The attachment also makes a very good use of rubber bands.
- 3
- 0
- 1
- 3d_rotation 4

FIRST LEGO League 2020-2021 RePlay Solutions and review with Robot Inventor
This course presents Solutions and Review of the FIRST LEGO League 2021 RePlay competition and it uses LEGO MIndstorms Robot Inventor as a base. It is a mirror course to the LEGO Education SPIKE course for the same competition. For each mission in the competition the course contains the rules for the mission, a tutorial how to accomplish it, instructions for the robot that is used and instructions for the attachment that is used. Every lesson also contains a Scratch and a Python program for accomplishing the mission and of course a 10 out of 10 tutorial that demonstrated how reliable the approach is. Upon completion of the course you will have many new ideas about how to approach mission on every FLL robotics competition and how to help your team score more points.
- 45
- 49:04
- 15

M06. Pull-Up Bar
The goal of the Pull-Up bar mission is to have the robot pull up on the bar... ok.. wording. In this video tutorial we demonstrate an interesting attachment that helps the robot attach to the Pull-Up bar and hang there. How do we do this - with a platform, that brings the robot to the bar and then detaches itself from the robot
- 3
- 0
- 1
- 3d_rotation 4