

Improving FLL Robot Game. Scissors mechanism for Lifting
The final way for lifting our box robot is by using a scissors mechanism. In this Episode, we would discuss the benefits and advantages of this mechanism.
- #452
- 20 Mar 2017
The final way for lifting our box robot is by using a scissors mechanism. In this Episode, we would discuss the benefits and advantages of this mechanism.

Before moving forward here is the simple task of building the mechanism and extending the legs. Extend the legs to fifteen LEGO units.

In this tutorial, we would drive the scissors mechanism and there are a number of rules that we must follow

It this episode we would present you with our attachment for lifting the robot.

The most stressed wheel in our system is the driven wheel. We've already fixed the problem with the driving wheel of the scissor mechanism and now it is time to look at the drive LEGO Mindstorms wheel.

Construct two legs for both sides of the robot. The task for this video is to attach this two legs on both sides and to build a system of gears and axles that power those legs.

Here is our solution for preventing torsion and bending of the LEGO Mindstorms EV3 axles.
Building instructions for the catapult that could be placed over the LEGO Mindstorms EV3 Brick. The idea of the catapult it to throw objects. The fact that it is over the brick makes it very convenient to place the motors below the brick and to use the Catapult.
This robot construction itself was used in the FIRST LEGO League Senior Solutions competition

Building instructions for the LEGO Mindstorms attachment using Rubber Bands

Probably the simples trick for pinless attachments that we've found. It is a construction build in just three steps. Simple as that. But it has a lot of potential to teach you how to use pinless attachments. Pinless attachments are very useful during FIRST LEGO League and World Robot Olympiad competitions.

This robot attachment shows you how to limit the rotation of a lever. It uses two gear wheels to transfer the motion on 90 degrees.
It could be built with LEGO Mindstorms EV3 and NXT versions. Most of the time during competitions like FIRST LEGO League and World Robotics Olympiad you need a lever for just a limited motion

The central axle of the robot is most of the time the most important. The robot moves forward and does things with this axle. It is important to learn to you could extend such axles, and change the level and position of the extensions.
This is a LEGO Mindstorms EV3/NXT robot attachment.

This is a real competition robot with three light sensors and a gyro.

This robot was built by your request. It includes NXT large wheels. The Large LEGOO Mindstorms wheels will give you a faster robot, but be careful, because it will not be that accurate.

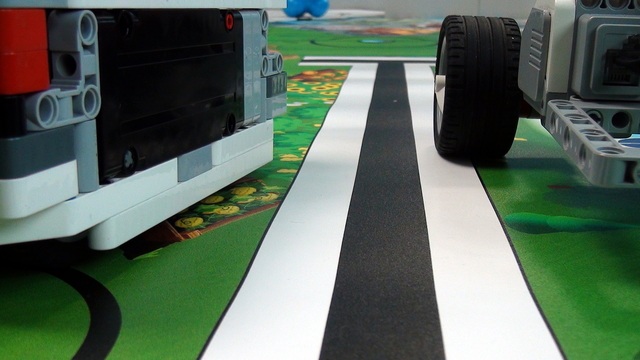
The balance of the construction of the robot has a great influence on how it will move. This is especially true if you would like to move in a straight line. If the robot is slightly heavier on the right it will move to the right. Here we have two robots - a Five Minute robot and a Box Robot and we will discuss the differences in the constructions and why the box robot is much better than the Five Minute even though it is using the same parts.

DIfferent wheels and tires will result in different behaviour of the robot. That is actually pretty common sense. The real question is what is the influence. Would the robot make smaller deviations if it has smaller wheels or it will make larger deviations? The tires could also be quite dirty or brand new. Or the wheels could be attached in different ways.

You could use the LEGO Steel Balls as a third wheel on the robot. It is a caster wheel. But this is steel and as we know from basic existence on this planet, where there is steel there is also rust. The steel ball could get quite rusty and this could have an influence on the behaviour of the robot
Should the robot be with a Front Wheel Drive or a Rear Wheel Drive to make it more precise? The answer is - front wheel will probably give you better results, but the wheel drive is not the most important thing. In this video tutorial on the LEGO Mindstorms Robots, we will do a few experiments to discuss the influence of the wheel drive on the precision of the movement.

The robot can move with different speed by applying different power to the motors. It will most of the time make smaller deviations when it moves slower. But you can't just move with a power of 10 all the time. This is a way too slow especially for competitions like FIRST LEGO League or World Robot Olympiad. In this video tutorial I would like to discuss the balance between motor power and robot movement error, how does the battery influence the power of the robot and to conduct an EV3-G experiment that will record the values of the Gyro Sensor along with the current power.

