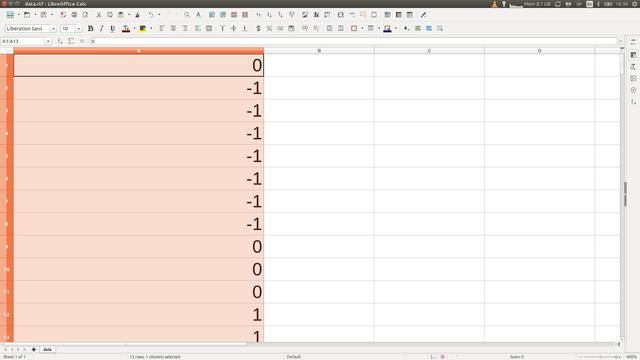
Datalog of the Gyro sensor when moving forward and keeping the orientation straight
The data log from the experiment when moving forward and keeping straight with an implementation for Proportional compensation.
- #389
- 10 Jan 2018
- 1
The data log from the experiment when moving forward and keeping straight with an implementation for Proportional compensation.


This video tutorial is about understanding the "magic". In this video tutorial, we would conduct an experiment and will look at how exactly does the integral part of the PID algorithm compensate for the error that the LEGO Mindstorms EV3 robot makes.

In this video tutorial, we would do a few experiments with the coefficients for the Integral compensation. There are actually two coefficients - "c" and "b"