Programs
Filters:


Python program to align to a line with color sensors from LEGO MINDSTORMS Robot Inventor
This program is developed with Robot Inventor - LEGO MINDSTORMS App Python and is used to make the robot align to a line with two color sensor. It's a mechanism we've used with EV3, NXT and now Inventor
- #nkdjt1
- 24 Mar 2022

Scratch (Word Blocks) program to move in straight line with the Motion sensor from LEGO MINDSTORMS Robot Inventor
This program makes the robot move in a straight line with the use of the LEGO MINDSTORMS Robot Inventor Motion sensor. It's developed with LEGO Education SPIKE App Word Blocks and uses a very simple algorithm for moving straight. When the robot moves slightly to the left or right align it face forward. Try to push the robot slightly. See what happens.
- #qb517r
- 24 Mar 2022
Python program to stop at distance from the border, with LEGO MINDSTORMS Robot Inventor
This program is developed with Robot Inventor - LEGO MINDSTORMS App Python and is used to make the robot stop at a distance from the border field.
- #frp0q4
- 24 Mar 2022
Scratch (Word Blocks) program to stop at distance from the border, with LEGO MINDSTORMS Robot Inventor
This program is developed with Robot Inventor - LEGO MINDSTORMS App Word Blocks and is used to make the robot stop at a distance from the border field.
- #24kpnz
- 24 Mar 2022
Python program to move in straight line with the Motion sensor from LEGO MINDSTORMS Robot Inventor
This program makes the robot move in a straight line with the user of the EGO MINDSTORMS Robot Inventor Motion sensor. It's developed with Robot Inventor - LEGO MINDSTORMS App Python and uses a very simple algorithm for moving straight. When the robot moves slightly to the left or right align it face forward. Try to push the robot slightly. See what happens.
- #hlrgzd
- 24 Mar 2022
Scratch (Word Blocks) program to align to a line with color sensors from LEGO MINDSTORMS Robot Inventor
This program is developed with Robot Inventor - LEGO MINDSTORMS App Word Blocks and is used to make the robot align to a line with two color sensor. It's a mechanism we've used with EV3, NXT, SPIKE and now Inventor.
- #xynbvj
- 24 Mar 2022
Python program to turn until reaching an angle with LEGO MINDSTORMS Robot Inventor Gyro Sensor
Python program to turn until reaching an angle with LEGO MINDSTORMS Robot Inventor Gyro Sensor.
- #acvosd
- 23 Mar 2022
Scratch (Word Blocks) program to turn until reaching an angle with LEGO MINDSTORMS Robot Inventor Gyro Sensor
Scratch program to turn until reaching an angle with LEGO MINDSTORMS Robot Inventor Gyro Sensor.
- #6dvh5w
- 23 Mar 2022

Program for Motorka - LEGO SPIKE Prime motorbike robot - LSAv3.4.5.llsp3
This program solves the problem caused by the lack of a differential on the robot, which makes its turns slower and wider.
The program reads the relative angle of the front motor, which is used for steering, and adjusts the speeds of the back motors—making one rotate faster and the other slower. This allows the robot to turn much more quickly and smoothly.
The program requires someone to manually turn the steering motor, so feel free to experiment with different turning angles and push the limits of the robot!
Make sure the markings on the moving and non-moving parts of the front motor are aligned, as this is an essential part of how the program functions.
- #2w94qn
- 11 Aug 2020

Program that makes Motorka move in a figure-eight (8) shape
This program makes Motorka – the LEGO SPIKE Prime motorbike robot – move in the shape of an 8 (or the infinity symbol 🙂)!
It builds on the previous program used for the robot, but instead of allowing the steering to move freely, this version controls the steering to guide the robot in a precise pattern.
- #ygum28
- 11 Aug 2020

Program for Pallo - SPIKE Prime catapult with target robot - LSAv3.4.5.llsp3
This program is for the target part of Pallo. It uses a piston with differently colored sections, which are detected by a color sensor.
The piston starts with a green section, so the program waits for that color to change—indicating that the target has been hit. Then, it celebrates!
The celebration is simple: the program reads the color of the new section to determine how accurately the target was hit, and it lights up the center button with that color. It also displays "YAY" on the hub's screen.
Feel free to improve the program however you like!
- #40fher
- 07 Aug 2020

Program for Calix - LEGO SPIKE Prime carrying robot - LSAv3.4.5.llsp3
This program is designed for the Calix – LEGO SPIKE Prime carrying robot. Calix is built to carry an object while autonomously following a black line.
This concept is one of the first things many people imagine when thinking about robotics—a robot that can assist at home!
Calix is a simple, first attempt at turning that idea into reality. It can transport light objects from one room to another by following a predefined black line.
The program operates as follows: First, it waits for you to place an object on the robot and press either the left or right hub button. Once triggered, the robot lifts the object slightly and begins following the black line. It continues along the path until it detects the same color consistently for more than 3 seconds—this is how it knows it has reached the end of the line. At that point, the robot raises the object higher and waits, holding the item securely in place.
- #p6ldyr
- 04 Aug 2020

Program for Tohuru - LEGO SPIKE Prime Owl Robot - LSAv3.4.5.llsp3
This program makes the Tohuru – LEGO SPIKE Prime Owl Robot move like an owl! But what does an owl move like? Well, we figured a key part of an owl’s behavior is firmly holding onto a branch. So, the first part of the program makes the robot grip tightly onto whatever is between its two wheels. After that, the owl begins spinning its head and searches for the closest object. Once it finds something, it stares at it—menacingly—until it moves away!
- #6viz0l
- 31 Jul 2020
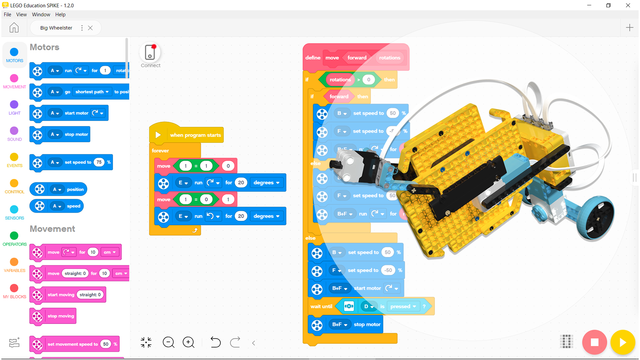
Program for Big Wheelster - LEGO SPIKE Prime robot - LSAv3.4.5.llsp3
This program makes the Big Wheelster – LEGO SPIKE Prime robot move forward until it bumps into something! This robot features one big wheel powered by two Medium Motors. What’s interesting is that the motors must spin in opposite directions to make the wheel rotate. That’s why we’ve created a My Block to control the robot.
The My Block allows you to set how far the robot should move—either a specific number of rotations or indefinitely (by setting it to 0 rotations). It also includes a logic option for direction: use 1 for forward and 0 for backward.
When the robot detects a bump using the front touch sensor, the program makes it reverse using the back wheels, helping it avoid hitting the same obstacle again!
- #blsqav
- 28 Jul 2020

Program for Swing Game - LEGO SPIKE Prime robot - LSAv3.4.5.llsp3
This program makes the Swing Game - LEGO SPIKE Prime robot move the two LEGO figures based on input from their respective controllers.
The color sensor controller uses the colored plate above it to determine movement. If the sensor detects blue, the LEGO figure moves forward. If it detects purple, the figure moves backward. Any other color will make it stop.
The motor controller works similarly. If the motor turns more than 30 degrees forward, the LEGO figure moves forward. If it turns more than 30 degrees backward, the figure moves backward. If it stays within that range, the figure stops.
The goal of the game is for both LEGO figures to reach the center without tipping the swing to either side. Good luck—and have fun!
- #q3ih0s
- 24 Jul 2020

Program for Mintonet - a LEGO Volleyball robot
The programs are designed to be used with Mintonet - a LEGO Volleyball robot.The project consists of several programs:
- Shoot - just shoots the ball.
- ShootWithUltrasonicSensor - this one is pretty much the same, but uses the ultrasonic seonsor infront of the robot as a triger.
- MoveAndShoot - the robot moves sideways until it sees a target and then it shoots the ball at it. This can be either its "volleyball partner" or a box or some other target practice object.
- MoveShootGoBack - the robot moves sideways until it sees a target, shoots the ball and then it returns to its starting position.
- MovePassMove - the robot moves sideways until it sees a target, shoots the ball and then it continues moving. This program is great to be used with second robot and try to pass each other the balls.
- #83uwm2
- 26 Jan 2019
Real Steel Boxing Robots Programs
These are the programs for our boxing robots and their Joysticks. They are made for a game of two fighters with their respective joysticks, fighting until one is knocked out or its "heart" touch sensor is punched by the other robot. The fighters require the two "leg" motors to be connected on ports B and C and the hand medium motors on port D. The touch sensors should be connected on port 1, however keep in mind that the game may be better without them. The distance sensor has no purpose in the program as it is used only for aesthetics. The joysticks require the motor for forward and backward to be connected on port B and the motor for left and right to be connected on port A. The touch sensor operates the hands and must be connected on port 4.
- #cqwn2x
- 29 Oct 2018

PLF-block for steering robots
The block has the following parameters from left to right:
- Maximum angle – the maximum steering angle of the front wheels. It is measured from position of straight wheels, to maximum left or right position.
- Relaxation coefficient – the relaxation coefficient regulates how smoothly the robot follows the line. The default value is 1. In general the range for the coefficient is between 0.5 till 2. If the difference between the value measured by the sensor on black and on white is great i.e. on black is 10 and on white is 80, then the coefficient should be smaller. If those values are closer, then the coefficient should be larger.
- Value on black – the value detected by the light sensor in reflected light mode when it is on the line.
- Value on white – the value detected by the light sensor in reflected light mode when it is outside the line.
- #v6t81q
- 09 Mar 2018

Straight at the end of the program - EV3-G program for returning to straight orientation
In this program, we return the robot to a straight orientation at the end of the program. If there is not enough time for the Mindstorms Gyro sensor the correct the orientation of the robot before the end of the program, then we should do it at the end.
- #bq6c38
- 10 Jan 2018