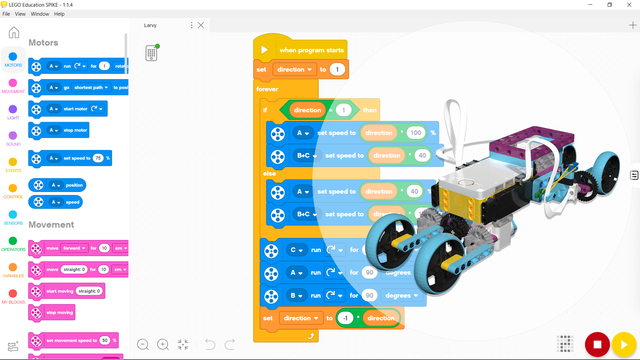
This program is designed for the Calix – LEGO SPIKE Prime carrying robot. Calix is built to carry an object while autonomously following a black line.
This concept is one of the first things many people imagine when thinking about robotics—a robot that can assist at home!
Calix is a simple, first attempt at turning that idea into reality. It can transport light objects from one room to another by following a predefined black line.
The program operates as follows: First, it waits for you to place an object on the robot and press either the left or right hub button. Once triggered, the robot lifts the object slightly and begins following the black line. It continues along the path until it detects the same color consistently for more than 3 seconds—this is how it knows it has reached the end of the line. At that point, the robot raises the object higher and waits, holding the item securely in place.