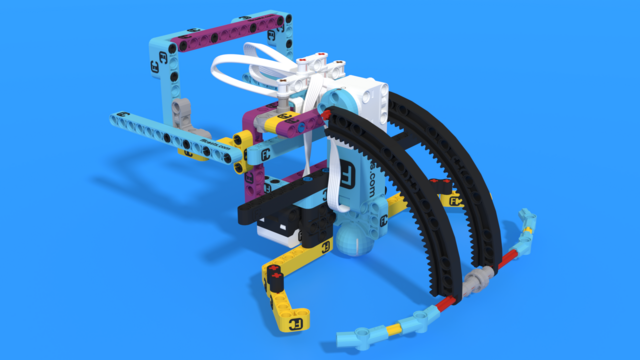
Zatter - the large frame, container holding, microbus looking LEGO SPIKE vehicle
Zatter is the big brother of Zat and Zatty. Zatter is here to take the load. It has a large container on its back, suitable for placing different toys inside and playing with them. Built from LEGO SPIKE Core set 45678 + LEGO SPIKE Expansion Set 45680 it was designed by my wife and just slightly improved by me and my colleagues. We spend a good hour or two with the kids placing different plush toys and playing with it.
Play time for a week: About an hour
- #1193
- 14 Nov 2020