FLL 2023: Bag 3 - Instructions for Immersive Experience - FIRST LEGO League 2023-2024 MASTERPIECE
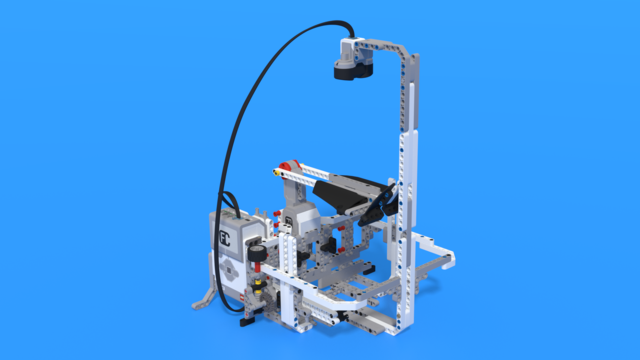
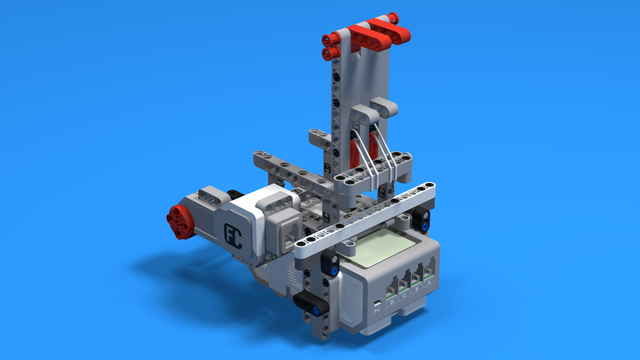
These are 3D Building Instructions for the Immersive Experience mission model for the FIRST LEGO League 2023-2024 MASTERPIECE competition.
- #1681
- 15 Aug 2023